(河南送变电建设有限公司 河南郑州 450001)
摘要:牵引设备牵引绳展放锁紧机器人是一种针对牵引场牵引设备牵引绳盘换盘施工中代替人工将牵引绳拉出一定距离并进行尾绳锁紧至换盘结束的智能化机器人,主要解决牵引设备绳盘更换传统人力施工劳动强度大,牵拉尾绳时间长,安全风险大等一系列施工难题。牵引设备牵引绳展放锁紧机器人的研制,实现牵引绳换盘的安全可靠施工,提升了牵引设备绳盘换盘施工作业智能化、自动化水平,提高施工作业安全系数,避免安全事故发生。
关键词:张力架线 牵引绳 换盘机器人 智能化
在现有的输电线路牵引场牵引机施工过程中,主要以人力操作牵引机更换牵引绳盘的操作。在牵引绳头(抗弯联结器)到达牵引设备前方的安全距离后,设备需减速牵引使其到达后尾车绳盘上并缠绕数圈,牵引机设备关闭尾车卷扬由人力代替尾车卷扬将牵引绳拉出一段距离并一直拉紧至换盘结束。
为解决大吨位牵引机设备张力放线施工过程中更换牵引绳盘时人力拉牵引绳。防止在换盘过程中牵引绳由于尾车张力卸除后,牵引轮上的牵引绳静摩擦力减小而出现的打滑甚至“跑绳”现象,防止意外抽伤工作人员,提高科学施工水平,减少事故发生。研制输电线路牵引场牵引绳换盘牵拉机器人保证施工人员的安全性,提高张力放线施工作业自动化水平,提高工作效率。
牵引设备牵引绳展放锁紧机器人主要有视觉系统,末端执行机构,机械自锁弹簧销结构,主臂旋转关节等几大部分组成。其具体机构如图2-1所示。
作业人员通过专用的螺旋地桩安装设备,根据实际使用情况安装若干螺旋地桩,并在牵引机尾车两侧合适位置安装整机设备。从而实现在牵引场机器人的快速锚固方式。

1.视觉摄像机2.末端执行机构3.末端角度调整电机4.自锁弹簧销5.主臂6.电缸7.主臂旋转关节8.总控制箱9.机械臂旋转关节座、10.机械臂底座11.螺旋地桩
图2-1 牵引设备牵引绳展放锁紧机器人简介
在抗弯联结器到达牵引设备前方的安全距离后,机器人通过自动识别抗弯联结器的位置,经过总控制箱内置电脑板分析处理后,机器人末端执行机构快速动作从而夹紧牵引绳,防止牵引绳“跑绳”的发生。
当末端执行机构完成夹紧动作时,通过传感器反馈,将末端执行机构完成动作的信息反馈给总控制箱内置电路板,内置电路板采集到信息经分析处理后控制电缸拉动机器人主臂,此时主臂旋转关节以及机械臂底座配合完成牵引绳尾绳的牵拉动作。
牵引设备牵引绳展放锁紧机器人主要由三节或多节智能化机械臂以及一处末端执行机构组成,第一节为主支撑机械臂与地面进行地面螺旋锚固连接。第二节为牵拉机械力臂,为方便机器人进行角度调整,机械臂增添牵拉角度调节和旋转调节两个自由度,并确定以电缸作为机器人的牵拉动力。末端执行机构安装在第二节牵拉机械臂尾部,末端执行机构牵引绳夹口轴线方向大致与牵引机后导向轮输出的牵引绳方向平齐。末端执行机构由安装在尾部的带涡轮蜗杆的减速电机,驱动机构上的齿条带动夹块夹住牵引绳,夹紧后主臂电机启动模拟人工牵拉牵引绳的情况对牵引绳施加一定的张力。施工人员可安全的进行换盘操作。
换盘结束后,需人工打开末端执行机构上的第二道机械自锁装置,第一道为丝杠螺母也具有自锁功能。拉开自锁弹簧销后。主臂电机将末端执行机构送至合适位置在由牵拉臂末端电机驱动松开末端夹块,并回到初始位置等待下次换盘。
(1)视觉系统简介
牵引设备牵引绳展放锁紧机器人的视觉系统主要由双目摄像机以及总控制箱内开发的电脑板组成,通过双目摄像机识别牵引设备牵引绳上的抗弯联结器,由于抗弯联轴器外观尺寸相对较大,而且易于识别等特点,确定将抗弯联结器作为视觉系统的识别信息,双目摄像机通过识别,将信息发送到开发电脑板中,经开发电脑板分析处理过后总控制箱控制各关节电机对牵引绳进行抓取,并在夹紧过后对牵引绳施加设定好的恒张力。
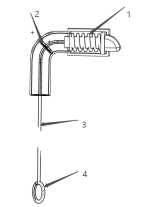
(2)末端执行机构简介

1.伺服电机、2.旋转轴承、3.末端旋转关节齿轮、4.XYZ三向力测力装置、5.末端夹具导轨座、6.机械自锁弹簧销组件、7.末端夹具、8.末端旋转关节电机
图4-1末端执行机构简介
如图4-1所示末端执行机构以及末端旋转关节由伺服电机、旋转轴承、末端旋转关节齿轮、XYZ三向力测力装置、末端夹具导轨座、机械自锁弹簧销组件、末端夹具、末端旋转关节电机等组成。
牵引绳夹具分为上下两部分,沟槽内设有条纹,以增大牵引绳夹持时,夹具的摩擦力,上下夹具的咬合动作通过末端夹具导轨座以及齿轮齿条机构来完成,将上下两个夹具分别置于两个不同的齿条上,两根齿条呈平行布置,齿条之间啮合驱动齿轮,通过驱动齿轮,使齿条发生相对运动,从而控制牵引绳夹具的开合,方便实现牵引绳的夹持和释放动作。
末端执行机构的驱动动作是由伺服电机以及末端旋转关节电机共同完成的,通过启动伺服电机,从而实现夹具的上下咬合和释放动作,末端旋转关节电机调节完成末端执行机构在牵拉过程中的角度调整动作。末端牵引绳夹紧夹具机构与末端旋转关节电机之间增设了XYZ三向测量装置,可以实时的监测牵引绳夹紧时张力各个方向上的数值,进而方便控制系统能够更为精准的控制机器人动作,保证施工安全。
(3)机械自锁弹簧销结构简介
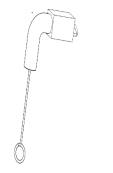
1.D型弹簧定位销组件、2.固定导向圆孔片、3.钢丝拉绳、4.拉环
图4-2 机械自锁弹簧销结构简介
如图4-2所示,末端执行机构上设有机械自锁弹簧销,可以实现末端执行机构夹紧牵引绳后,机械自锁弹簧销自动实现对夹持机构进行限位卡紧,有效地避免人为误操作机器人造成的牵引绳跑绳现象,保证施工作业的安全性。当机器人完成换盘操作后,需要施工人员人为的解除机械自锁弹簧销的限位,再进行牵引绳的释放工作。
(4)主臂旋转关节简介
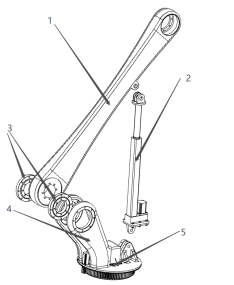
1.主臂、2.电缸、3.旋转轴承、4.主臂支座、5.中部旋转关节座
图4-3 主臂旋转关节结构简介
如图4-3所示,牵引设备牵引绳展放锁紧机器人的牵拉牵引绳的动作,主要是靠电缸以及主臂旋转关节共同实现完成的,通过电缸的伸缩动作,从而实现牵引绳的牵拉动作,在电缸伸缩过程中,主臂旋转关节通过铰链机构配合电缸,从而实现机械臂牵拉过程中的角度调整相关动作。
中部旋转关节结构由带齿旋转轴承、电缸铰接支座、总控制箱、主臂支座、中部座旋转电机组成。中部旋转关节上装有整个机械臂的控制中心,即总控制箱,总控制箱内集成伺服电机控制器以及开发电脑板等电子元件。通过相关传感器收集牵引绳夹紧夹具的压力数据以及牵引绳牵引行走的距离,通过总控制箱对采集的信息数据,进行分析整理后,通过驱动机器人各关节动作,保证机器人的尾绳夹持和牵引动作的精准协调流畅,进而保证机器人施工作业的安全可靠性。
夹紧机构电机选型
根据设计要求,为防止牵引绳跑绳,则必须保证夹紧机构与牵引绳之间的摩擦力在200kg—500kg之间,设定夹紧机构与牵引绳之间的摩擦系数u为0.25,为保证牵引绳不跑绳,由公式:
f=uN;
摩擦力取最大500kg;
得N=500*10/0.25=20000N
由于传动机构是由一个驱动齿轮带动两根齿条运动,因此驱动齿轮上的传递扭矩:
F=N/2=10000N
为保证牵引绳与夹紧机构有足够的的接触面积,因此夹紧装置的长度应控制在180mm以上,因此选用的齿轮齿数应保证30齿以上,模数是3.5,选取驱动齿轮为35齿,则小齿轮的分度圆直径:
D=mz=3.5*35=122.5mm
因此作用在驱动齿轮上的扭矩:
T1=Fr=10000*61.25/1000=612.5N*m
为保证牵引绳到位后夹紧机构能迅速压紧,设定夹紧机构上下移动的行程为50mm,则一根齿条移动的行程为
S=50/2=25MM,
运行距离需要在0.5s内完成,则齿条的运行速度为
V=S/t=25/0.5=50mm/s
根据齿轮齿条传动机构公式
V=π*D*n/60
得驱动齿轮转速
n=7.80r/min
根据公式:
P=T*n/9550=500w
为保证夹持机构安全可靠,因此驱动电机应保证2倍安全系数
故选用电机功率为1kw,转速选用1440r/min,
减速机选型
I=n1/n2=1440/7.8=184.6
故选用的减速机为摆针iRVRV减速机,选用的减速比185的减速机。
牵拉电缸选型
串联机器人的整个链路是由一组连杆刚体组成的,连杆由关节(运动副)连接起来,每个关节有一个平移或者转动的自由度。关节的运改变了其邻接连杆的相对角度和位置。 所以为机械手臂的每一连杆建立一个坐标系,并用齐次变换来描述这些坐标系间的相对位置和资态,通常把描述一个连杆与下一个连杆间相对关系的齐次变换叫做A变换,一个A矩阵就是一个描述连杆坐标系间相对平移和旋转的齐次变换,根据电脑做机器人运动学仿真计算最终确定牵拉电缸选用3吨的电动液压缸,液压缸行程选用500mm,即可完成机器人牵拉牵引绳盘尾绳行走距离大约1m左右行程的动作。
采用牵引设备牵引绳展放锁紧机器人对牵引设备换盘时牵引绳尾绳进行抓取张紧,能够代替传统人工进行换盘施工作业,机器人采用电气自动化控制,保证了机器人运动控制的得精确性,另外,机器人的末端执行机构通过传感器对尾绳提供恒张力并实时监测,并机械自锁装置保证张紧后的安全
牵引设备牵引绳展放锁紧机器人能够有效解决传统人力施工劳动强度大,牵拉尾绳时间长,安全风险大等一系列施工难题。减少施工人员人力成本投入的的同时,提高了施工人员更换绳盘的工作效率,有效的防止牵引绳“跑绳”现象,保证施工人员安全。进一步提高张力放线机械自动化水平。
参考文献
[1] 贾卫平.Stanford 机械手运动学及仿真模拟的研究[D].大连大连理工大学,2000.
[2] 李光亮,陈君若.KUKA KR6 机器人的运动学分析与仿真[J].自动化仪表,2018,39(1):40-43,47.
[3] 冷玉珊,邓子龙高兴军基于MATLAB 六自由度串联机器人运动学分析[J].制造业自动化,2020,42(9):56-61.
[4] 王智兴,樊文欣,张保成,等.基于Matlab 的工业机器人运动学分析与仿真[J].机电工程,2012,29(1):33-37.
[5] 王其军,杜建军MOTOMAN机器人逆运动学新分析[J]哈尔滨工业大学学报,2010,42(3):451-454.
[6] 陕军峰,多关节机器人轨迹规划及离线编程方法研究[D].银川:宁夏大学,2011.
[7] 王美妍,李杰.六自由度工业机器人轨迹规划算法研究[J].精密制造与自动化,2017(4):47-49,62
[8] 高艺.马国庆,于正林,等.一种六自由度工业机器人运动学分析及三维可视化仿真[J].中国机械工程,2016,27(13):1726-1731
[9] 徐有胜,一种六自由度串联机器人的运动学与动力学仿真分析[D].深圳:深圳大学.2017.
[10] 鲍清岩,毛海燕,湛年远,等.工业机器人仿真应用[M].重庆:重庆大学出版社,2018.
[11] 谭伟美,卢柱阳.工业机器人在焊接技术的应用分析[J].科技创新与应用,2021,11(15):153-155.
[12] 夏中坚.工业机器人的虚拟仿真技术在信息化课程教学中的有效应用[J].南方农机,2021,52(10):148-149.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



