空军航空大学 吉林 长春 130022
摘要:针对低空飞行中可能出现航迹偏差的情况,分析了目前常用的 30°切入法、偏航修正量表修正法、切入航线修正法、六十分之一修正法和10°、20°、30°修正法的基本原理和实施步骤,总结概括出各种方法的使用条件及应用场景,为低空飞行修正航迹保证飞行安全提供理论依据。
关键词:低空飞行;航迹修正;实施步骤;适用范围
1 引言
低空飞行能够避开雷达的侦测,实现突然的袭击效果,尤其是在空投、空降等训练科目中,低空飞行是飞行员必备的技能。低空飞行的准确实施需要飞行员全面的使用地标、推测、无线电等基本的领航方法,同时由于潜在的气流扰动、飞行员视野狭窄等原因,对飞行员判断偏航距离、修正飞机航迹造成了很多困难[1]。传统的航迹修正方法对低空飞行的航迹修正并不完全适用,比如经典的直接修正法,如图1所示,要求飞机准确的通过航线的起点,并且由起点到检查点之间航向要保持稳定,而低空飞行飞机的航向通常会依据障碍物情况作出调整,这样就导致直接修正
法无法使用。传统的航迹修正方法还有固定时间切入法,如图2所示,固定时间切入法在忽略掉PH角的前提下,可以不要求飞机由起点到检查点之间保持航向稳定,但是飞机的已飞距离必须足够长,而且偏航距离也要求相对较大。低空飞行由于障碍物的限制,很难能找到足够长的航线,同时低空飞行由于视野狭窄,偏航距离较大时,很容易造成无法目视找到检查点的情况,必须在偏航距离较小的时候及时修正,这样就导致固定时间切入法无法使用。因此低空飞行常推荐30°切入法、偏航修正量表修正法、切入航线修正法、六十分之一修正法和10°、20°、30修正法等修正航迹的方法。本文并对这些方法的基本原理、实施步骤进行分析,总结概括出这些方法的使用条件及应用场景,为低空飞行修正航迹保证飞行安全提供理论依据[2]。

图1 直接修正法修正航迹
图2 固定时间切入法修正航迹
2 基本原理
2.1 30°切入法修正原理
30°切入法是飞机在飞行中,通过检查点确定出偏航距离以后,操纵飞机向偏出的反方向修正30°,从而使飞机切回航线的修正方法。
图3 30°切入法修正航迹
![]() 是飞行员所保持的原航向,
是飞行员所保持的原航向,![]() 为飞行员所保持的新航向,即:
为飞行员所保持的新航向,即:
![]() (1)
(1)
![]() 是飞机的偏航距离,
是飞机的偏航距离,![]() 是飞机切回航线需要飞的距离,
是飞机切回航线需要飞的距离,![]() 是飞机切回航线所飞行时间。通过观察不难发现:
是飞机切回航线所飞行时间。通过观察不难发现:
![]() (2)
(2)
因此飞机切回航线的时间![]() ,就是飞机保持当前地速飞2倍偏航距离所需要的时间。可以采用时间掌握飞机切回航线的时机。
,就是飞机保持当前地速飞2倍偏航距离所需要的时间。可以采用时间掌握飞机切回航线的时机。
2.2 偏航修正量表修正法原理
偏航修正量表修正法,是飞机在飞行中,确定出偏航距离以后,根据已飞距离,通过查偏航修正量表(如图5)的方式,确定出飞机的航向修正量,操纵飞机向偏出的反方向修正该角度,飞机即保持航迹与航线平行的状态飞行。
图4 偏航修正量表修正法
图5 偏航修正量表
![]() 是飞行员所保持的原航向,
是飞行员所保持的原航向,![]() 为飞行员所保持的新航向,即:
为飞行员所保持的新航向,即:
![]() (3)
(3)
![]() 是飞机的偏航距离,
是飞机的偏航距离,![]() 是飞机的已飞距离,从图4中不难发现:
是飞机的已飞距离,从图4中不难发现:
![]() (4)
(4)
由于PH角较小,小角度的正切值近似等于弧度值,弧度转化为度需要乘以57.3,用60近似代替:
 (5)
(5)
根据公式5,制作成图5的偏航修正量表。
2.3 切入航线修正法原理
切入航线修正法,是飞机在飞行中,确定出偏航距离以后,选择不同的航向修正角度(如15°、30°、45°),根据偏航距离、飞机当前的速度,通过查表(图7)的方式找到对应的飞行时间,操纵飞机向偏出的反方向修正该角度,飞行对应的飞行时间,飞机就会切回到航线上。

图6 切入航线修正法
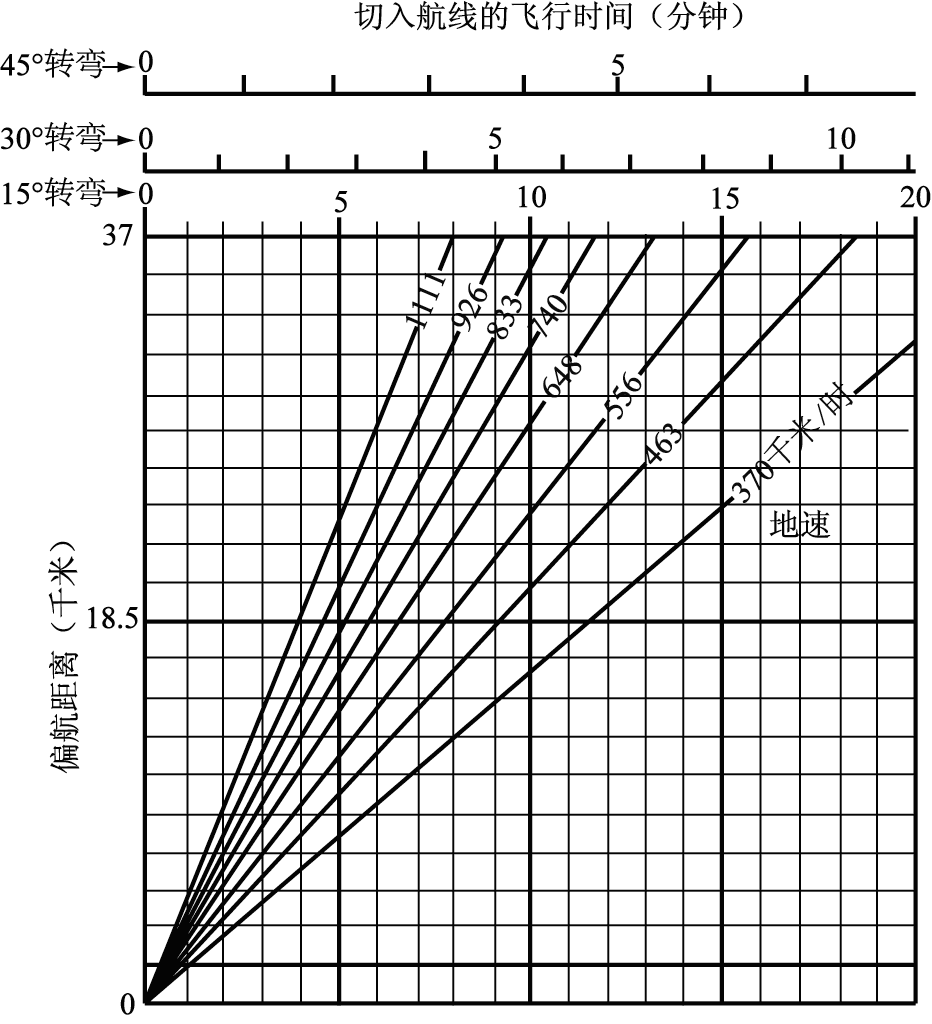
图7 切入航线修正法表
为表示方便将航迹修正量15°、30°、45°,由![]() 表示。飞机的平飞距离由图6中可得:
表示。飞机的平飞距离由图6中可得:
![]() (6)
(6)
飞机的平飞时间为:
![]() (7)
(7)
![]() 是飞机的偏航距离,
是飞机的偏航距离,![]() 是飞机修正航向后保持的平飞距离,
是飞机修正航向后保持的平飞距离,![]() 是平飞距离所对应的平飞时间。
是平飞距离所对应的平飞时间。
根据公式6和7,即可制作出图7中的表格。
2.4 六十分之一修正法原理
六十分之一修正法,是飞机在飞行中,确定出偏航距离时,如果飞机距离下一个目标点刚好为60km,则只需要操纵飞机向偏出的反方向修对应的偏航距离的角度值即可。比如偏航距离是1km,则修正1°,偏航距离2km,修正2°。
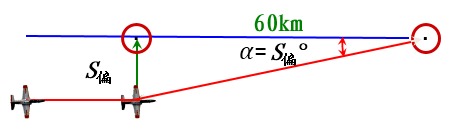
图8 六十分之一修正法
由图8可知,飞机航迹的变化量等于![]() ,只需要航向改变对应角度。
,只需要航向改变对应角度。
![]() (8)
(8)
![]() 通常比较小,小角度的正切值近似等于弧度值,弧度转化为度需要乘以57.3,用60近似代替:
通常比较小,小角度的正切值近似等于弧度值,弧度转化为度需要乘以57.3,用60近似代替:
![]() (9)
(9)
2.5 10°、20°、30°修正法原理
10°、20°、30°修正法,是飞机在飞行中,确定出偏航距离小于6km时可以采用的修正方法,判断出偏航距离以后,操纵飞机向偏出的反方向修正对应的偏航距离的十倍对应的角度值。飞行固定的平飞距离6km,飞机就会回到航线上。比如偏航距离是1km,则修正10°,平飞6km;偏航距离2km,修正20°,平飞6km。

图9 10°、20°、30°修正法
由图9可知:
![]() (10)
(10)
![]() 通常比较小:
通常比较小:
 (11)
(11)
飞机的平飞距离采用固定的6km:
![]() (12)
(12)
3 使用条件
3.1 六十分之一修正法使用条件
从图3中可以分析得到该方法要求飞机最初的状态是保持应飞航向飞行,即飞机的航迹和航线平行。采用固定的切入角30度,实施简便,同时切回航线也较为迅速。适用于飞机没有准确通过航线起点,或者飞机由于规避障碍物偏离航线,但是飞行员明确飞机的应飞航向,能够准确确定出偏航距离时的修正。能够在飞机偏航距离较大时,快速的使飞机切回到航线上[3]。
3.2 偏航修正量表修正法使用条件
该种修正方法要求飞机必须准确的通过航线起点,飞行中航向保持稳定,并且飞行员在判断出偏航距离的同时,确定出飞机的已飞距离。该方法采用查表的方式,极大的减轻了飞行员的计算负担,偏航距离也没有大小限制。飞机在低空飞行时,如果对某航段的应飞航向没有进行提前计算,可以采用该修正方法来确定应飞航向,也可以将该方法作为30°切入法的前置修正方法[4]。
3.3 切入航线修正法使用条件
从图6和图7不难分析出,该种修正方法不要求飞机必须准确的通过航线起点,可以根据飞机的偏航距离,灵活的选择修正的角度。采用查表的方式,减小空中的计算量,但因查表的过程涉及参量较多,通常适用于双座的战斗机,由后舱发送飞行指令,前舱负责实施。
3.4 六十分之一修正法使用条件
从之前的原理分析中可知,该种修正方法要求在距离目标点60km的位置附近能够找到合适的检查点,同时飞机的偏航距离也比较小时才可以采用。该方法实施非常简便,没有复杂的计算,适合飞行员独立使用[5]。
3.5 10°、20°、30°修正法使用条件
该种修正方法要求偏航距离在6km范围内,由于飞机采用了固定的平飞距离,无论飞机的偏航距离是多少,飞机回到航线的距离和时间是固定的,飞行员实施非常方便,回到航线也非常迅速。
4 实施方法
4.1 地面准备
充分细致的地面准备是空中实施的保证。按照之前对每种修正方法的原理和使用条件分析,低空飞行时需要根据每条航线特点,在飞行前或者飞行中选择合适的修正方法,并进行相应的地面准备通常包括一下内容:
(1)计算不同偏航距离所需飞行时间做成表格(如图10),辅助采用30°切入法时快速心算。
![]()
图10 偏航距离飞行时间对应表
(2)根据偏航修正量表修正法,列出偏航修正量表。
(3)根据切入航线修正法,制作不同飞行速度、不同偏航距离、不同转弯角度下的切入航线的飞行时间表格。
(4)在每一条航线上,在接近下一转弯点前60km的位置尝试找合适的检查点,如果有合适的检查点,将其标注出来。以便飞行时采用六十分之一修正法。
(5)确定出每一边航线对应的飞行速度6km的飞行时间。便于飞行中使用10°、20°、30°修正法时快速心算。
4.2空中实施
在地面准备的基础上,在实际的低空飞行中,就可以在判断出偏航距离后实施航迹修正。空中实施的基本步骤包括:
(1)判断飞机的偏航距离![]() 。
。
(2)如果飞机准确通过航线的起点,飞行员可以采用偏航修正量表法进行修正,在偏航修正量表中查找到对应的航向修正量。操纵飞机向偏出的反方向转过对应的角度,保持修正后的航向飞行,飞机的航迹即平行于航线。
(3)飞机保持应飞航向飞行,航迹平行于航线,偏航距离较大可以采用30°以上的角度修正,如30°切入法、切入航线修正法中的30°和45°修正。
(4)偏航距离小于6km时,可以采用10°、20°、30°修正法,使用简单,实施迅速。
(5)如果飞机在距离转弯点还有6km的位置判断出偏航距离,采用六十分之一修正法最为简洁方便。
5 结束语
为了保证低空飞行的安全,飞行准备时会对飞行轨迹进行详细的规划,从而规避危险地形,避开雷达监测,因此低空飞行过程中,必须保证飞机按照既定的航迹飞行,准确及时发现飞机的航迹偏差并作出修正。本文主要总结分析了30°切入法、偏航修正量表修正法、切入航线修正法、六十分之一修正法和10°、20°、30修正法共五种航迹修正的方法,每一种方法都有自己的优缺点和使用条件,在实际使用时要根据每种方法的特点灵活使用
[6]。同时在低空飞行修正飞机航迹时应该注意一下问题:
(1)低空飞行应该将主要精力放在机舱外,切记埋头于机舱内,这就要求航迹的修正方法要简单方便,不需要过多的查阅表格资料。
(2)低空飞行视野狭窄,飞行中的检查点又环环相扣,一旦丢失一个检查点,很可能找不到后续的地标,这就要求低空飞行稍有偏差就要及时修正。
(3)通常修正时,如果飞机的偏航位置和下一个检查的位置在航线的同一侧,修正时“宁小勿大”,如果飞机的偏航位置和下一个检查点分别位于航线的两侧,修正时“宁大勿小”,例如:飞机偏在航线的左侧,下一个检查点也位于航线的左侧,则修正飞机航向时,就是“宁小勿大”,这样才能保证飞机在视野狭窄的情况下也能顺利找到下一个转弯点。
(4)如果飞机丢失了自己的位置,在保证飞行安全,不被敌方发现的前提下,可以通过提升飞行高度,扩大视野的方式来找回自己的位置。
(5)本文所介绍的修正方法,每种方法都有其局限性,尤其在接近该方式适用条件的边界时,误差通常较大,就要求飞行员在使用以上方法时,注意掌握每种方法的使用条件。
参考文献:
[1]徐振东.空中领航学[M].北京:航空工业出版社,2018:191~198
[2]刘平,姬伟杰,史巧恒,韩潇弘毅. 超低空飞行领航能力培养研究[J].现代导航,2018,2: 348~352.
[3张焕.空中领航学[M].成都:西南交通大学出版社,2019:51~58
[4] 基于神经网络控制的飞机导航系统应用[J]. 冯昊. 中国设备工程. 2017(24)
[5] 多惯性导航系统信息融合方法研究[J]. 芈小龙,向敏. 舰船科学技术. 2019(17)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



