1.浙江大学生物系统工程与食品科学学院,浙江杭州 310058; 2.农业农村部光谱检测重点实验室,浙江杭州 310058
摘要: 含水量是表征水稻生理和健康状况的关键参数,精确预测水稻含水量对于水稻育种和大田精准管理具有重要意义。目前,利用无人机搭载光谱图像传感器监测作物生长的研究主要集中在利用植被指数评估作物在单一或者几个生育期的生长参数,针对作物含水量监测的研究非常有限。本研究主要利用多旋翼无人机低空遥感平台获取不同生育期水稻冠层的RGB图像和多光谱图像,通过提取植被指数和纹理特征,分析水稻的动态生长变化,并构建了基于随机森林回归方法的含水量预测模型。试验结果表明:(1)从无人机图像提取的植被指数、纹理特征以及地面测量的含水量都能用于监测水稻生长,并且这些参数随水稻生长呈现出了相似的动态变化趋势;(2)与RGB图像相比,多光谱图像评估水稻含水量具有更高的潜力,其中归一化光谱指数NDSI771,611实现了更好的预测精度(R2=0.68,RMSEP=0.039,rRMSE =5.24%);(3)融合植被指数和纹理特征能够进一步改善含水量的预测结果(R2=0.86,RMSEP=0.026,rRMSE=3.51%),预测误差RMSEP分别减小了16.13%和18.75%。上述结果表明,基于无人机遥感技术监测水稻含水量是可行的,可为农田精准灌溉和田间管理决策提供新思路。
关键词: 无人机低空遥感;水稻含水量;RGB图像;多光谱图像;植被指数;纹理特征;特征融合
中图分类号: S24 文献标志码: A 文章编号: 201911-SA002
引文格式:万亮, 岑海燕, 朱姜蓬, 张佳菲, 杜晓月, 何勇. 基于纹理特征与植被指数融合的水稻含水量无人机遥感监测[J]. 智慧农业(中英文), 2020, 2(1): 58-67.
Citation:Wan Liang, Cen Haiyan, Zhu Jiangpeng, Zhang Jiafei, Du Xiaoyue, He Yong. Using fusion of texture features and vegetation indices from water concentration in rice crop to UAV remote sensing monitor[J]. Smart Agriculture, 2020, 2(1): 58-67.
1 引言
水稻(Oryza sativa L.)是世界上最重要的粮食作物之一,维持着全球一半以上人口的生存[1]。含水量是表征水稻生理和健康状况的关键参数,与水稻受胁迫程度紧密相关[2,3],也是作物生长过程中进行光合作用以及蒸腾作用的重要因素之一。因此,运用准确且有效的方法评估水稻的含水量非常必要,对于水稻育种以及大田精准管理具有重要意义。
目前,水稻含水量的测量方法主要是基于田间破坏性采样,这种方法测量数据相对准确,但劳动强度大、效率低且容易破坏水稻的生长环境。遥感技术因其高效且准确的优点,已广泛地应用于作物生长监测[4-6]。常用的遥感平台根据感知距离分为地面平台、无人机遥感平台以及卫星遥感平台等。与其他两种平台相比,卫星遥感平台可以覆盖更大的范围,已经被用于评估各种作物的生长参数,如叶面积指数[7]、覆盖度[8]、生物量[9]、叶绿素和氮素[10,11]以及产量[5]等。然而,卫星遥感平台获得图像分辨率较低、访问周期较长,而且运行容易受到天气的影响[12],因此不适合用于小型农田的作物生长监测。地面平台主要利用各种移动车辆或者便携式仪器直接或间接地获取作物的生长参数。尽管地面平台能够提供分辨率较高的图像,但其覆盖范围小,工作效率相对较低,无法满足田间高通量表型信息获取的要求。
近些年,无人机遥感技术发展快速,逐渐弥补了地面平台和卫星遥感平台的缺陷。无人机遥感平台具有快速、准确、便捷以及可操作性强的优势[13]:无人机遥感平台能够获取更高分辨率的作物冠层图像,并可以灵活地搭载不同图像传感器(RGB相机、多光谱相机、高光谱相机以及热红外相机等)用于评估各种生长参数,包括油菜花数[14]、生物量[1]、产量[15]、叶面积指数[16]、叶绿素[17]以及氮素[18]等。此外,一些研究者也试图利用无人机遥感平台去评估水分对于作物生长的影响。Espinoza等[19]研究了无人机高分辨率多光谱和热成像相机用于葡萄受水分胁迫诊断的潜力,结果显示多光谱和热成像图像信息能够评估葡萄田间的水分分布。Matese等[20]从无人机图像中计算得到作物水分胁迫指数(Crop Water Stress Index,CWSI),利用CWSI评估了葡萄生长的水分胁迫情况,说明了无人机遥感图像有利于评估葡萄园水分状况的空间变异性。Zarco-Tejada等
[21]利用从无人机遥感图像中计算得到的荧光参数、温度以及窄波段指数等数据评估作物生长的水分胁迫情况,结果表明无人机能够评估作物生长、气孔导度以及田间水势。
以上研究证明了无人机遥感平台用于作物水分胁迫评估的潜力,然而基于无人机遥感平台开展作物含水量定量评估的研究还相对缺乏。已有研究利用无人机遥感平台监测水稻的生长变化,但往往只针对几个生长期,并没有实现基于无人机遥感平台的水稻全生长周期的监测。此外,无人机遥感图像不仅包含丰富的光谱信息,还有丰富的纹理特征,可以用于表征作物的冠层结构变化,但大部分研究仅仅利用无人机图像的光谱信息监测作物生长,并没有发挥无人机遥感图像的优势。已有研究表明,光谱信息(植被指数或者反射)在作物冠层覆盖度较大的时候容易出现饱和的现象,而融合光谱信息和图像纹理特征能够在某种程度上克服饱和问题[1,14,22]。
本研究主要利用基于无人机的RGB和多光谱图像的植被指数和纹理特征评估水稻的含水量。为了能够更有效地表征水稻含水量的动态变化,研究收集了全生长周期的水稻含水量和无人机遥感图像数据。针对不同特征的特性,比较了水稻含水量预测精度的差异,并最终融合全部图像特征改善了含水量的预测结果。
2 试验设计与数据收集
2.1 试验设计
试验于2018年6月至2018年10月在浙江省诸暨市安华镇粮食生产功能基地(29°31'5.35"N,120°6'6.12"E,平均海拔高度16m)开展。试验水稻品种是“甬优1540”,于6月初移栽到试验田,10月中旬收获。试验田包括了100个小区,每个小区面积45m2(9m×5m),种植密度为30cm×20cm(图1)。本试验设置了5个氮肥梯度(0,120,240,360,480kg/hm2),3个磷肥梯度(30,60,90kg/hm2),以及3个钾肥梯度(120,240,360kg/hm2)。氮肥以4:3:3的比例分别施用于水稻移栽前、分蘖期和孕穗期,磷肥和钾肥全部施用于移栽前。

图1 试验田的位置和布局
Fig. 1 Location and layout of experimental field
2.2 无人机图像获取
研究采用浙江大学数字农业与农业物联网创新团队独立研发的八旋翼电动无人机作为遥感平台,无人机详细的参数已在先前的研究中公布[23]。无人机遥感平台搭载RGB相机(NEX-7 camera,Sony,Tokyo,Japan)和多光谱相机(MQ022MG-CM,XIMEA,Munster,Germany)收集全生长期的水稻冠层图像,具体飞行时间如表1所示。RGB和多光谱图像的分辨率像素分别是6000×4000和409×216,其通过一个三轴自稳性云台与无人机遥感平台稳定连接。多光谱相机包括25个波段,光谱范围是604~870nm。无人机试验的飞行高度和速度分别为25m和2.5m/s,航向和旁向重叠率分别为60%和75%,并于当地时间10:00-16:00开展。在无人机起飞前,根据照度计(MQ-200,Apogee Instruments,Logan,UT,USA)测量的光照强度调整相机的曝光时间,防止由于光照的变化导致图像出现曝光不均匀的现象。
2.3 田间数据收集
分别于每次飞行试验后采集田间水稻的含水量数据,如表1所示,分别从9次试验获取了900个样本数据。对于每次采样,分别从100个采样点选取3株水稻送回实验室。
表1 飞行时间统计
Table 1 The statistics of flight time
| 生长时期 | 时间 | 生长时期 | |
| 2018/06/30 | 分蘖初期 | 2018/08/27 | 抽穗初期 |
| 2018/07/14 | 分蘖期 | 2018/09/09 | 抽穗期 |
| 2018/07/21 | 拔节初期 | 2018/09/19 | 灌浆初期 |
| 2018/08/08 | 拔节期 | 2018/10/13 | 灌浆后期 |
| 2018/08/18 | 孕穗期 |
在实验室,首先用水清除样本表面的水和土壤,然后去掉水稻样本的根,并用电子天平获取样本剩下部分的鲜重,最后将这些样本烘干,从而得到样本的干重。
3 研究方法
3.1 图像预处理及特征提取
在每次飞行试验中,无人机遥感平台总共获得了228张RGB和多光谱图像。首先,采用图像拼接的方法将单张RGB和多光谱图像合成整个试验田的正射影像,这个操作利用拼接软件PhotoScan(Agisoft LLC,ST,Petersburg,Russia)实现,具体流程包括:特征点匹配、生成密集点云、生成正射影像以及最后导出正射影像。然后,基于反射校正算法,将原始图像的像元值(Digital Number,DN)转换成反射值(Reflectance,R),计算公式如(1)所示:
 (1)
(1)
其中,R和DN分别代表图像的反射值和像元值;k和b分别表示斜率和截距;i表示图像中波段,这里包括RGB图像的三个波段和多光谱图像的25个波段。接着,对校正后的多光谱图像进行光谱校正,从而去除一些二次谐波[24]。最后根据每个小区的尺寸,将拼接正射影像分割成100个子图像,代表100个水稻种植小区。进一步,利用随机森林(Random Forest,RF)分类器去除图像背景,并计算得到水稻冠层的光谱和纹理特征。
本研究选择了两类图像特征预测水稻含水量。首先,基于无人机RGB和多光谱图像的波段信息,选择一些常用的植被指数:绿红植被指数GRVI(Green Red Vegetation Index)[25]、植物色素比率PPR(Plant Pigment Ratio)[26]、绿红比值指数GRRI(Green Red Ratio Index)[27]、改良的绿红植被指数MGRVI(Modified Green Red Vegetation Index)[28]以及归一化光谱指数NDSI(Normalized Difference Spectral Index)[14],计算公式如(2)~(6):
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
式中,RR、RG、RB分别代表红、绿、蓝3个波段的反射值, 和
和 表示多光谱图像中波段
表示多光谱图像中波段 和
和 的反射值。对于指数NDSI的不同波段组合,根据水含量的预测精度,选择预测效果最好的3个NDSI指数(NDSI1、NDSI2、NDSI3)。
的反射值。对于指数NDSI的不同波段组合,根据水含量的预测精度,选择预测效果最好的3个NDSI指数(NDSI1、NDSI2、NDSI3)。
进一步,根据灰度共生矩阵GLCM(Gray-level Co-occurrence Matrix)[29],从RGB图像的红、绿、蓝三波段分别提取四个纹理特征:对比度CON(Contrast)、自相关COR(Correlation)、能量EN(Energy)以及同质性HO(Homogeneity)。CON主要表示图像灰度分布均匀程度和纹理粗细度,COR表示矩阵元素在行或列方向上的相似程度,EN为矩阵中所有元素的平方和,HO代表矩阵元素相对于对角线分布的紧密度。由于RGB图像包含3个波段,每个波段都有4个纹理特征,即总共12个纹理特征。多光谱图像分辨率较低,并且其与RGB图像的纹理特征间有较高的相关性,因此本研究不考虑多光谱图像的纹理特征。最后,利用来自RGB和多光谱图像的12个纹理特征以及7个植被指数去评估水稻含水量,所有图像特征如下表2所示。
表 2 本研究使用的图像特征
Table 2 Image features used in this research
| 特征 | 特征数目 | |
| 植被指数 | GRVI、PPR、GRRI、MGRVI、 NDSI1、NDSI2、NDSI3 | 7 |
| 纹理特征 | R_CON、R_COR、R_EN、R_HO、G_CON、G_COR、G_EN、G_HO、B_CON、B_COR、B_EN、B_HO | 12 |
注:R_CON、G_CON以及B_CON表示从图像红(R)、绿(G)以及蓝(B)波段提取的CON纹理特征。根据同样的缩写方式,可以得知其他纹理特征代表的意义。
3.2 模型建立与评估
为了评估水稻含水量,本研究引入无人机图像的光谱和纹理特征,研究了不同的无人机图像特征对于含水量预测精度的差异并通过特征融合改善其预测精度。首先,基于图像特征和含水量,分析了水稻在全生长周期的生长变化。本研究并没有分析所有的图像特征随水稻生长的变化,而是选取了典型的已广泛用于监测作物生长的绿度植被指数GRVI[1,30,31]。另外,纹理特征G_EN也用于评估水稻的动态生长。然后,分别基于植被指数和纹理特征以及特征融合评估了水稻含水量。最后,讨论了不同图像特征对于含水量预测模型的相对重要性。本研究采用随机森林回归算法建立含水量的评估模型,其具有较强的潜力去处理非线性、过拟合以及高维的图像数据
[32]。为了去建立稳定的评估模型,数据集被拆分成训练集(占全部数据2/3)和测试集(占全部数据1/3),并利用国际公认的决定系数(R2)、均方根误差(RMSEP)以及相对均方根误差(rRMSE)来评估模型的预测精度,其计算如公式(7)~(9)所示:
 (7)
(7)
 (8)
(8)
 (9)
(9)
其中, 、
、 、
、 分别表示测量的、预测的以及平均测量的含水量,n是样本数。
分别表示测量的、预测的以及平均测量的含水量,n是样本数。
4 结果与分析
4.1 水稻生长动态分析
植被指数、纹理特征以及含水量随水稻生长而变化,如图2所示。可以看出,GRVI、G_EN以及含水量呈现出交替变化,但其趋势不一样。GRVI依次在分蘖期、拔节期以及抽穗初期出现适当的增长,在拔节初期、孕穗期、灌浆初期以及灌浆后期出现下降趋势,然而在抽穗期呈现相反的变化。值得注意地,纹理特征在大部分时期与GRVI呈现相同的变化趋势,而在分蘖初期和灌浆后期变化相反。进一步分析含水量与图像特征间的联系,可以观察到,含水量从分蘖初期到抽穗初期与GRVI变化相反,而从抽穗期到灌浆后期都出现一直下降的趋势。这些发现表明了图像特征与水稻含水量能够用来监测水稻生长,并能呈现动态变化,同时也证明了无人机图像特征与水稻含水量间存在一定联系。

图2 图像特征和含水量随水稻生长的变化
Fig.2 Image features and water concentration response to rice growth
4.2 基于植被指数的含水量预测
基于无人机RGB图像,分别建立4个植被指数含水量预测模型,模型评估效果如表3所示。可以看出,从RGB图像中提取的植被指数能够有效地预测水稻的含水量,其中GRVI、GRRI以及MGRVI获得了相对较好的预测效果(R2 = 0.64,RMSEP = 0.042,rRMSE = 5.54%)。另外,PPR也取得了满意的含水量预测结果(R2 = 0.59,RMSEP = 0.045,rRMSE = 5.95%)。这些结果表明了无人机RGB图像的植被指数能用于监测水稻的含水量。
表3 不同植被指数含水量预测精度的比较
Table 3 Comparison of prediction accuracy of water concentration from different vegetation indices
| R2 | RMSEP | rRMSE(%) | |
| GRVI | 0.64 | 0.042 | 5.54 |
| PPR | 0.59 | 0.045 | 5.95 |
| GRRI | 0.64 | 0.042 | 5.54 |
| MGRVI | 0.64 | 0.042 | 5.54 |
基于多光谱图像的植被指数也被用于评估含水量。如图3所示,基于任意两波段组合的NDSI指数实现了较好的预测结果。另外,不同的波段组合对于含水量的预测精度存在较大差异。其中,NDSI771,611和NDSI784,611取得了最好的预测精度(R2=0.68,RMSEP=0.039,rRMSE=5.24%;R2=0.67,RMSEP=0.040,rRMSE =5.29%)。NDSI808,611也得到了一个较好的含水量预测结果(R2=0.67,RMSEP=0.040,rRMSE = 5.32%)。与表3中基于RGB图像的植被指数相比,NDSI获得了一个更好的预测结果,误差RMSEP减小了7.14%。
图3 基于任意两波段组合的NDSI的含水量预测结果
Fig.3 Water concentration prediction result based on NDSI with random two bands
进一步,将三种效果最好的多光谱植被指数(NDSI771,611,NDSI784,611和NDSI808,611)和表3中的4种基于RGB图像的植被指数全部用作变量,输入到随机森林回归模型,从而实现多植被指数融合的水稻含水量预测,结果如图4所示。可以发现,融合多个植被指数实现了一个更好的预测结果(R2=0.80,RMSEP=0.031,rRMSE=4.17%)。与表3中的单个植被指数的预测结果相比,预测误差极大地减小了。其中,相对于最佳指数
NDSI771,611和NDSI784,611,预测误差RMSEP分别减小了20.51%和22.5%。
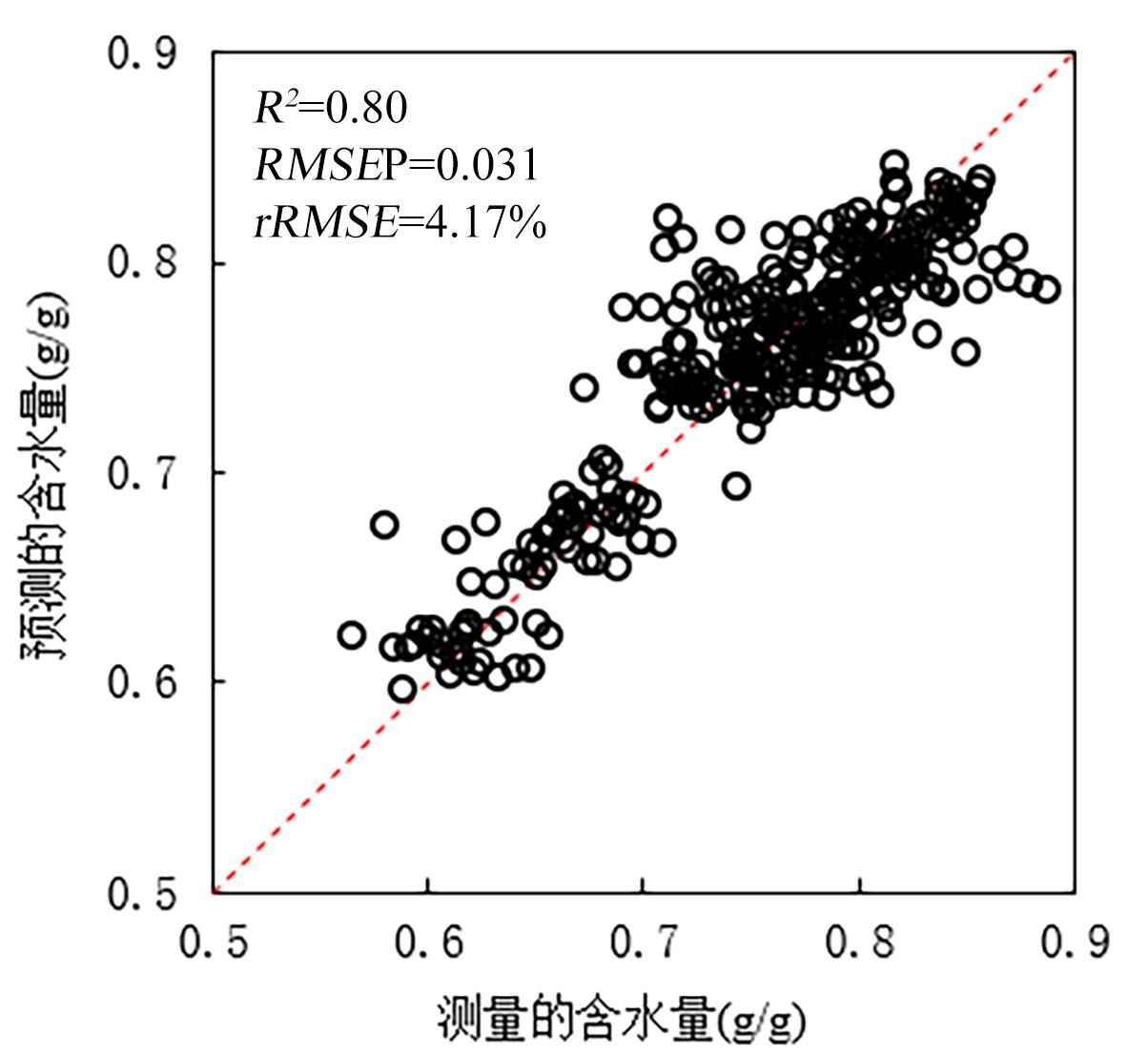
图4 基于多植被指数融合的含水量预测结果
Fig.4 Water concentration prediction results based on fusion of multiple vegetation indices
4.3 基于图像纹理特征的含水量预测
与植被指数相似,图像的纹理特征对评估作物的生长参数也有很高的潜力。因此,本研究利用了RGB图像的12个纹理特征预测水稻含水量,结果如表4所示。相比于植被指数,纹理特征仅实现了一个较差的评估精度,其中,R_COR得到了最佳的含水量预测结果(R2 = 0.40,RMSEP = 0.054,rRMSE = 7.18%)。在同一波段的四个纹理特征中,COR可以获得更好的含水量预测结果。另外,对于三个不同波段,波段R中的纹理特征具有更高的含水量预测潜力。
表4 不同纹理特征含水量预测精度的比较
Table 4 Comparison of prediction accuracy of water concentration from different texture features
| R2 | RMSEP | rRMSE | |
| R_CON | 0.18 | 0.065 | 8.64% |
| R_COR | 0.40 | 0.054 | 7.18% |
| R_EN | 0.27 | 0.060 | 8.06% |
| R_HO | 0.22 | 0.063 | 8.35% |
| G_CON | 0.17 | 0.065 | 8.65% |
| G_COR | 0.20 | 0.064 | 8.54% |
| G_EN | 0.19 | 0.065 | 8.62% |
| G_HO | 0.16 | 0.065 | 8.68% |
| B_CON | 0.16 | 0.066 | 8.85% |
| B_COR | 0.29 | 0.059 | 7.80% |
| B_EN | 0.18 | 0.065 | 8.62% |
| B_HO | 0.21 | 0.063 | 8.40% |
进一步,融合RGB图像的12个纹理特征预测含水量,其结果如图5所示,多纹理特征融合实现了一个更好的预测结果(R2 = 0.78,RMSEP = 0.032,rRMSE = 4.29%)。比较于单个纹理特征,多纹理特征融合极大地改善了含水量的预测精度,预测误差RMSEP减小了40.74%。重要地,其也实现了一个与多植被指数融合相当的含水量预测准确率。这些结果证明了基于无人机的图像纹理特征对于水稻含水量预测的潜力。
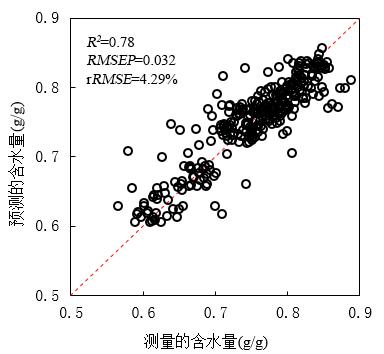
图5 基于多纹理特征融合的含水量预测结果
Fig.5 Water concentration prediction results based on fusion of multiple texture features
4.4 特征融合改善含水量预测精度
上述结果已经证实了仅使用植被指数或纹理特征也能实现较好的含水量预测,然而仍不能满足预测准确率。因此,本研究充分利用无人机遥感图像的优势,类比于多植被指数融合,将前面提到的7种植被指数和12个图像纹理特征全部用于含水量预测模型的输入,实现植被指数和纹理特征的融合,从而改善水稻含水量的预测精度。如图6所示,融合植被指数和纹理特征取得了一个更好的预测精度(
R2=0.86,RMSEP=0.026,rRMSE=3.51%)。比较于多植被指数和纹理特征的预测结果,预测误差RMSEP分别减小了16.13%和18.75%。不同特征对于预测模型的重要性如图7所示,可以看出这些特征对于模型的重要性不同,其中,B_EN和R_EN拥有最高的重要性,与其表4的结果不一致,这意味着基于随机森林回归的多特征融合方法可能会改变单个图像特征与含水量的关系。另外,3个多光谱指数也表现出了相当高的重要性。这些结果证明了融合图像纹理特征和植被指数有极大的潜力改善水稻含水量的预测精度。最终,基于最好的含水量预测模型,得到了全生长周期的田间水稻含水量的分布图,如图8所示。
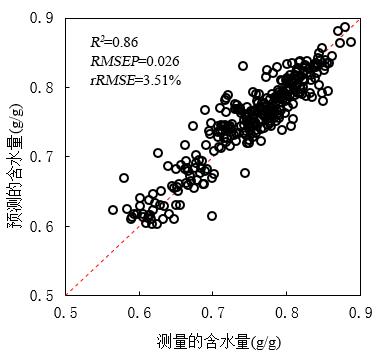
图6 基于植被指数和纹理特征融合的含水量预测结果
Fig. 6 Water concentration prediction results based on fusion of vegetation indices and texture features

图7 基于特征融合的含水量预测结果
Fig.7 Water concentration prediction
results based on feature fusion
图8 全生长周期的田间水稻含水量分布图
Fig.8 Distribution mapping of water concentration in rice at field during the whole growth periods
可以发现,水稻含水量随生长时期逐渐减小,灌浆后期达到最小。从分蘖初期到孕穗期,水稻含水量变化不明显,并且不同小区间没有明显差异。从抽穗期开始,不同小区的含水量逐渐显现出了明显的差异。这些发现与图2(c)中测量的含水量变化是基本一致的。这些结果证明了无人机遥感平台能够为作物生长提供多时空的田间处方图,有助于精准农业应用和田间管理决策。
5 结论
本研究主要利用多旋翼无人机遥感平台搭载RGB相机和多光谱相机实现了水稻全生长周期的生长监测以及含水量评估,研究结果表明:
(1)基于无人机图像的植被指数和纹理特征以及地面测量的含水量能用于水稻生长监测,它们能反映水稻全生长周期的动态交替变化,并且这些参数随水稻生长呈现出了相似的动态变化趋势。
(2)植被指数和纹理特征在预测水稻含水量方面具有很高的潜力。基于单个图像特征,植被指数实现了更好的预测精度如NDSI771,611和NDSI784,611。此外,融合多植被指数或多纹理特征能够极大地改善单个图像特征的预测精度,预测误差RMSEP分别减小了20.51%和40.74%。
(3)融合植被指数和纹理特征能够进一步改善水稻含水量的预测结果,预测误差RMSEP分别减小了16.13%和18.75%。
不同于先前的研究,本研究主要讨论了不同图像特征对于作物生长参数的预测差异,发现了多图像特征融合可以改善作物生长参数的预测精度,这与先前的研究结果是一致的[22,33,34]。拟进一步研究包括探讨多图像特征融合对其他作物生长参数评估精度的影响,并测试模型对其他作物品种的适用性,从而增加模型的鲁棒性等。
参考文献
[1] Cen H, Wan L, Zhu J, et al. Dynamic monitoring of biomass of rice under different nitrogen treatments using a lightweight uav with dual image-frame snapshot cameras[J]. Plant Methods, 2019, 15: no.32.
[2] Féret J B, Le Maire G, Jay S, et al. Estimating leaf mass per area and equivalent water thickness based on leaf optical properties: Potential and limitations of physical modeling and machine learning[J]. Remote Sensing of Environment, 2019, 231: 1-14.
[3] Yao J, Sun D, Cen H, et al. Phenotyping of Arabidopsis drought stress response using kinetic chlorophyll fluorescence and multicolor fluorescence imaging[J]. Frontiers in Plant Science, 2018, 9: no. 603.
[4] Li Y, Zhou Q, Zhou J, et al. Assimilating remote sensing information into a coupled hydrology-crop growth model to estimate regional maize yield in arid regions[J]. Ecological Modelling, 2014, 291: 15-27.
[5] Jin X, Li Z, Yang G, et al. Winter wheat yield estimation based on multi-source medium resolution optical and radar imaging data and the AquaCrop model using the particle swarm optimization algorithm[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 126: 24-37.
[6] Sulik J J, Long D S. Spectral considerations for modeling yield of canola[J]. Remote Sensing of Environment, 2016, 184: 161-174.
[7] Campos-Taberner M, García-Haro F J, Camps-Valls G, et al. Multitemporal and multiresolution leaf area index retrieval for operational local rice crop monitoring[J]. Remote Sensing of Environment, 2016, 187: 102-118.
[8] Jia K, Liang S, Gu X, et al. Fractional vegetation cover estimation algorithm for Chinese GF-1 wide field view data[J]. Remote Sensing of Environment, 2016, 177: 184-191.
[9] Punalekar S M, Verhoef A, Quaife T L, et al. Application of Sentinel-2A data for pasture biomass monitoring using a physically based radiative transfer model[J]. Remote Sensing of Environment, 2018, 218: 207-220.
[10] Moharana S, Dutta S. Spatial variability of chlorophyll and nitrogen content of rice from hyperspectral imagery[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 122: 17-29.
[11] Clevers J G P W, Gitelson A A. Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and-3[J]. International Journal of Applied Earth Observation and Geoinformation, 2013, 23: 344-351.
[12] 陈仲新, 郝鹏宇, 刘佳, 等. 农业遥感卫星发展现状及我国监测需求分析[J]. 智慧农业, 2019, 1(1): 32-42.
Chen Z, Hao P, Liu J, et al. Technical demands of agricultural remote sensing satellites in China[J]. Smart Agriculture, 2019, 1(1): 32-42.
[13] 兰玉彬, 邓小玲, 曾国亮. 无人机农业遥感在农作物病虫草害诊断应用研究进展[J]. 智慧农业, 2019, 1(2): 1-19.
Lan Y, Deng X, Zeng G. Advances in diagnosis of crop diseases, pests and weeds by UAV remote sensing[J]. Smart Agriculture, 2019, 1(2): 1-19.
[14] Wan L, Li Y, Cen H, et al. Combining UAV-based vegetation indices and image classification to estimate flower number in oilseed rape[J]. Remote Sensing, 2018, 10(9): no.1484.
[15] Yu N, Li L, Schmitz N, et al. Development of methods to improve soybean yield estimation and predict plant maturity with an unmanned aerial vehicle based platform[J]. Remote Sensing of Environment, 2016, 187: 91-101.
[16] 高林, 杨贵军, 李红军, 等. 基于无人机数码影像的冬小麦叶面积指数探测研究[J]. 中国生态农业学报, 2016, 24(9): 1254-1264.
Gao L, Yang G, Li H, et al. Winter wheat LAI estimation using unmanned aerial vehicle RGB-imaging[J]. Chinese Journal of Eco-Agriculture, 2016, 24(9): 1254-1264.
[17] Xu X Q, Lu J S, Zhang N, et al. Inversion of rice canopy chlorophyll content and leaf area index based on coupling of radiative transfer and Bayesian network models[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 150: 185-196.
[18] Wang Z, Skidmore A K, Darvishzadeh R, et al. Mapping forest canopy nitrogen content by inversion of coupled leaf-canopy radiative transfer models from airborne hyperspectral imagery[J]. Agricultural and Forest Meteorology, 2018, 253: 247-260.
[19] Espinoza C Z, Khot L R, Sankaran S, et al. High resolution multispectral and thermal remote sensing-based water stress assessment in subsurface irrigated grapevines[J]. Remote Sensing, 2017, 9: no.961.
[20] Matese A, Baraldi R, Berton A, et al. Estimation of water stress in grapevines using proximal and remote sensing methods[J]. Remote Sensing, 2018, 10(1): no. 114.
[21] Zarco-Tejada P J, González-Dugo V, Berni J A J. Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera[J]. Remote Sensing of Environment, 2012, 117: 322-337.
[22] Maimaitijiang M, Ghulam A, Sidike P, et al. Unmanned Aerial System (UAS)-based phenotyping of soybean using multi-sensor data fusion and extreme learning machine[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 134: 43-58.
[23] 朱姜蓬, 岑海燕, 何立文, 等. 农情监测多旋翼无人机系统开发及性能评估[J]. 智慧农业, 2019, 1(1): 43-52.
Zhu J, Cen H, He L, et al. Development and performance evaluation of a multi-rotor unmanned aircraft system for agricultural monitoring[J]. Smart Agriculture, 2019, 1(1): 43-52.
[24] 鲍一丹, 李艺健, 何勇, 等. 基于波段权重的多尺度 Retinex 遥感图像渐晕校正方法[J]. 农业工程学报, 2019, 35(17): 186-193.
Bao Y, Li Y, He Y, et al. Vignetting correction for remote sensing image using multi-scale Retinex based on band weight[J]. Transactions of the CSAE, 2019, 35(17): 186-193.
[25] Tucker C J. Red and photographic infrared linear combinations for monitoring vegetation[J]. Remote Sensing of Environment, 1979, 8(2): 127-150.
[26] Metternicht G. Vegetation indices derived from high-resolution airborne videography for precision crop management[J]. International Journal of Remote Sensing, 2003, 24(14): 2855-2877.
[27] Gamon J A, Surfus J S. Assessing leaf pigment content and activity with a reflectometer[J]. The New Phytologist, 1999, 143(1): 105-117.
[28] Bendig J, Yu K, Aasen H, et al. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley[J]. International Journal of Applied Earth Observation and Geoinformation, 2015, 39: 79-87.
[29] Haralick R M, Shanmugam K, Dinstein I H. Textural features for image classification[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1973 (6): 610-621.
[30] Torres-Sánchez J, Peña J M, de Castro A I, et al. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV[J]. Computers and Electronics in Agriculture, 2014, 103: 104-113.
[31] Rasmussen J, Ntakos G, Nielsen J, et al. Are vegetation indices derived from consumer-grade cameras mounted on UAVs sufficiently reliable for assessing experimental plots?[J]. European Journal of Agronomy, 2016, 74: 75-92.
[32] Mutanga O, Adam E, Cho M A. High density biomass estimation for wetland vegetation using WorldView-2 imagery and random forest regression algorithm[J]. International Journal of Applied Earth Observation and Geoinformation, 2012, 18: 399-406.
[33] Yue J, Yang G, Tian Q, et al. Estimate of winter-wheat above-ground biomass based on UAV ultrahigh-ground-resolution image textures and vegetation indices[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 150: 226-244.
[34] Liu T, Li R, Zhong X, et al. Estimates of rice lodging using indices derived from UAV visible and thermal infrared images[J]. Agricultural and Forest Meteorology, 2018, 252: 144-154.
Using fusion of texture features and vegetation indices from water concentration in rice crop to UAV remote sensing monitor
Liang Wan1,2, Haiyan Cen1,2*, Jiangpeng Zhu1,2, Jiafei Zhang1,2, Xiaoyue Du1,2, Yong He1,2
(1.College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou 310058, China;
2.Key Laboratory of Spectroscopy Sensing, Ministry of Agriculture and Rural Affairs, Hangzhou 310058, China)
Abstract: Water concentration is a key parameter to characterize crop physiological and healthy status. It is of great significance of employing unmanned aerial vehicle (UAV) low-altitude remote sensing technology to predict crop water concentration for crop breeding and precision agriculture management. UAV remote sensing has been widely used for monitoring crop growth status, mainly focusing on using vegetation indices to estimate crop growth parameters at single or several growth stages. Few studies have been performed on evaluating crop water concentration. Consequently, this study mainly used vegetation indices and texture features extracted from UAV-based RGB and multispectral images to monitor water concentration of rice crop during the whole growth period. Firstly, a multi-rotor UAV equipped with high-resolution RGB and multispectral cameras to collect canopy images of rice crop, and water concentration was also measured by ground sampling. Then, vegetation indices and texture features calculated from RGB and multispectral images were used to analyze the growth changes of rice. Finally, random forest regression method was used to establish a prediction model of water concentration based on different image features. The results show that: (1) vegetation index, texture features and ground-measured water concentration could be used to dynamically monitor rice growth, and there existed correlations among these parameters; (2) image features extracted from multispectral images possessed more potential than those from RGB images to evaluate water concentration of rice crop, and normalized difference spectral index NDSI
771, 611 achieved the best prediction accuracy (R2 = 0.68, RMSEP = 0.039, rRMSE = 5.24%); (3) fusing vegetation indices and texture features could further improve the prediction of water concentration (R2 = 0.86, RMSEP = 0.026, rRMSE = 3.21%), and the prediction error of RMSEP was reduced by 16.13% and 18.75%, respectively. These results demonstrats that it is feasible to apply UAV-based remote sensing to monitor water concentration of rice crop, which provides a new insight for precision irrigation and decision making of field management.
Key words: unmanned aerial vehicle (UAV); water concentration of rice; RGB image; multispectral image; vegetation indices; texture feature; feature fusion
收稿日期:2019-11-13 修订日期:2020-02-19
基金项目:国家重点研发计划课题(2016YDF0200600, 2016YDF0200603);江苏省现代农业装备与技术协同创新中心项目(4091600007)
作者简介:万 亮(1994-),男,博士研究生,研究方向:无人机遥感,Email:liangwan@zju.edu.cn。
* 通讯作者:岑海燕(1982-),女,博士,研究员,研究方向:农作物光学成像与智能传感技术及装备、高通量植物表型技术、无人机低空遥感,电话:0571-88982527,Email:hycen@zju.edu.cn。
doi: 10.12133/j.smartag.2020.2.1.201911-SA002


客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号