(大庆师范学院 机电工程学院,大庆 163712)
摘要:针对目前社会老龄化,社会服务工作需求量越来越大,为缓解公共服务工作的需求量,开发设计了智慧助老”养老服务型机器人。该机器人能够实现消毒、越障、自主巡航等多项功能。平台主要由导向轮组、地盘轮组、履带轮组、消毒装置、测温装置组成,搭配智能化开发板实现平台智能化服务。
关键词:智能,社会服务,移动平台
0 引言
随着经济社会以及人们对高质量服务需求的快速增长,采用机器人代替人类日常工作已经成为一种普遍趋势,越来越多的服务机器人应用在家庭服务、教育娱乐、引导业务、医疗支持等生活场景[1]。近年来,人口老龄化趋势加快以及医疗、教育需求的持续旺盛,中国服务机器人存在巨大市场潜力和发展空间,成为机器人市场应用中颇具亮点的领域[2,3,4],使用高智能化服务机器人辅助代替人工操作的优越性与必要性越发凸显[5,6]。
1 智能小车结构设计
1.1 总体结构
养老服务型机器人是一款针对社会服务场所研发的智能养老服务机器人,可实现消毒、越障、遥控、自主巡航、循迹、测温、语音播报、人脸识别等多项功能,采用大容量锂电池,续航工作可达20小时,大功率快充可在一小时内完成充电。养老服务型机器人由导向轮组、WIFI视觉模块、LED体温显示屏、语音交互模块、测温装置、消毒装置、体温播报装置、环境消毒装置、双横臂独立悬架、履带轮组、随动轮组等多个结构和功能模块组成。该机器人机械部分全部采用模块化平台进行搭建,车体部分的总装图如图1所示。

图1 养老服务型机器人整体结构图
基础车体采用前履带后轮式配置,增加接地面积,提高通过性。前轮选用双横臂独立悬架结构,减少遇到障碍时的冲击。两侧配置导向轮装置,后轮采用随动方式,使其在复杂地面上的贴合性提高。采用智能交互语音模块,能为使用者提供贴心帮助,同时无线移动式摄像头也能实时传输小车的使用情况。远程监控杜绝密切接触,做到智能化无人运行。
驱动组件采用履带轮组保证机器人在复杂地形有足够的越障能力,双横臂式独立悬架缓和颠簸路面对的冲击;随动轮组增大与地面接触面积,为机器人提供更强的驱动能力;双轴蝎式机械臂搭载于后方,独特的仿生结构可以180度半球无死角摆动,机械臂末端装载消毒容器装置实现非接触式大范围消毒。
1.2 前部导向轮组
为了适应多地形道路环境要求,提高转向性能,该机器人前端采用了双导轮机构,每组导轮通过短螺杆与前支撑杆相连,保证导轮具有自转的自由度,在通过一些弯度较大且接触面光滑的外壁障碍,机器人不会卡死在墙角处,同时减少动能的损耗,如图2所示。

图2 双滚动轮模型图
1.3 前部履带轮组
为保证机器人在全地形地区有足够的前部通过角与越障能力,其前部履带轮机构采用小诱导轮、大负重轮、履带的组成方式;大负重轮与单电机相连,提供动力;小诱导轮在前与车体连接,提高越障所需的前部通过角,如图3所示。

1:小诱导轮 2:轮间连杆 3:大负重轮 4:履带
图3 左侧履带轮组结构图
为缓解越障时产生的冲击,前部履带机构配置双横臂式独立悬架机构,提升复杂地形的通过性和足够的竖向位移空间,缓解在复杂路面行进时对车体的冲击,如图4所示。

1:驱动电机 2:双横臂悬架框架
3:悬架与车体连接件 4:悬架弹簧 5:履带轮组
图4 配有悬架的右侧履带轮组
1.4 后部随动轮组
养老服务型机器人后部参考月球车设计方案,采用双轮随动轮组机构,每组随动轮配有两个橡胶轮,并采用单独电机驱动方式。在通过复杂路面时,随动轮组相对于车架上下运动,增大与地面附着系数,提高通过性,如图5所示。

图5 双轮随动轮组
1.5 消毒装置
机器人配备前后双无接触式消毒装置,前消毒装置用于对检测人员的手部消毒,后消毒装置用于对周边环境进行消毒。前消毒装置通过超声波、近红外传感器获取距离信息,实现对检测目标的正确检测。执行机构采用舵机带动曲柄连杆机构实现消毒液的连续压出操作,前部消毒装置如图6所示。

图6 前部消毒装置
机器人主体的后方设计双轴蝎式机械臂,通过机械臂的舵机转动,不断缓慢摆动消毒液容器,消毒液容器口部利用超声波高频振荡将消毒液雾化后实现对车体后方180度无接触式消毒,如图7所示。

图7 后部消毒装置
2 智能模块
2.1 智能体温检测装置
智能测温装置连接在车架上方,当站在机器人前方半米内时,机器人发出测温提醒,将手部对准测温模块2s,随后LED显示屏中显示该体温,其中高于38℃LED显示屏则会闪烁红光,同时语音播报报警。若低于34℃显示屏会闪绿光且不显示温度,并语音播报模块提示重新测温。WiFi视觉相机通过局域网远程操控,连接后台可随时查看存储使用情况,在杜绝密切接触的条件下,做到智能运行,如图8所示。

1:WiFi视觉相机 2: LED体温显示屏 3:语音交互模块
4: 测温装置 5红外定位模块 6:语音播报模块
图8 智能测温装置
2.2 定迹巡航
整车传感器方案最终确定为如9(d)所示的五灰度传感器方案,分别用来实现对标定路线、障碍物、起始线的检测。其中,外侧双灰度传感器检测场地预设线初始位置横向标记线、前部单灰度传感器配合对路线上的障碍物进行实时检测,而寻迹方案主要采用内侧双灰度传感器(如图9(a)),检测公共区域黑色标记线。
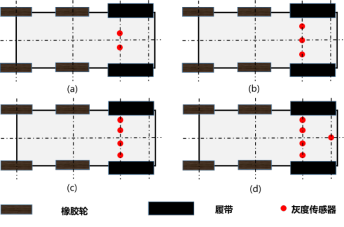
图9 整车传感器方案示意图
内侧双灰度传感器组合实现定线寻迹,结合双灰度信息通过车轮的差速运动实现左右转及回正,如图10所示。利用有限状态机(Finite-state machine)FSM建立双传感器循迹运动的数学模型[7],利用状态表来表示运动状态。对于本次使用的数字量灰度传感器,单个传感器的状态可分为0、1两种情况,则双传感器的状态表,如表1所示

图10 双传感器循迹示意图
表1 传感器状态表
状态序号 | 左侧传感器 | 右侧传感器 |
1 | 1 | 1 |
2 | 1 | 0 |
3 | 0 | 1 |
4 | 0 | 0 |
状态1时,小车状态处于正中状态,运动策略为直线运动。状态2时,小车处于左偏状态,运动策略为左侧动力轮正转,右侧动力轮反转实现车身的回正。状态3时,小车处于右偏状态,运动策略为右侧动力轮正转,左侧动理论反转实现车身的回正。状态4时,小车处于未触发状态,此时认为小车位于障碍物标记线或者抵达终点可配合外侧双灰度计数传感器进行运动规划并出指令,小车开始越障或停止运动。如图11所示,为小车越过弯道障碍过程示意图。

图11 弯道过弯示意图
2.3 机器人控制系统逻辑
机器人整体控制方案采用上下位机(双Bsara控制板)协调底盘运动,整机运动规划采用时序任务[8],按定线循迹-目标检测-体温检测-检测消毒-定线循迹顺序进行功能实现,配置双拓展板(通信转接板v2.0路由器wifi模块、语音识别HB640模块)上位机连接灰度传感器以及整车驱动电机,实时读取传感器数据并为整车后轮提供驱动力。机器人系统逻辑如图12所示

图12 机器人系统逻辑
3 结论
本文所研发的机器人可代替工作人员开展测温、手部消毒、环境消毒等工作,数据可视化,识别体温被测人员面部数据,记录人员信息,与大数据互通;无接触测温消毒,降低医患交叉感染率;部署灵活,可根据不同位置需求,自主巡航到达目标位置;多传感器融合定位,可实现自主精准导航,3D全向避障,复杂环境移动灵活;可实现多种运动模式,在人力不足时默认为寻迹模式自动循环任务,在寻迹导航检测目标过程中周期性开展消毒喷雾,当有特定需求时可切换蓝牙模式手动操控机器人远程消毒。
参考文献
[1]李艳,高倩,宋瑞波.智能伴老机器人设计研究[J].设计,2021,34(23):71-73.
[2]陶永,刘海涛,王田苗等.我国服务机器人技术研究进展与产业化发展趋势[J].机械工程学报,2022,58(18):56-74.
[3]汪天雄,余强,付佳鑫.老龄智能服务机器人产品设计研究[J].设计,2023,36(13):78-81.
[4]Bartosz S ,Sławomir T ,Ewa B , et al.Robots for Elderly Care: Review, Multi-Criteria Optimization Model and Qualitative Case Study.[J].Healthcare (Basel, Switzerland),2023,11(9):
[5]杨明伟,吴海燕.中国养老服务体系问题及对策探析[J].兰州工业学院学报,2022,29(05):118-121.
[6]赵培,解丹婷,孟卓.老年人家用智能药箱的设计与研究[J].机械设计与制造工程,2021,50(09):49-52.
[7]黄凌杰.服务机器人室内投递的全局路径规划仿真[J].福建电脑,2023,39(03):104-106.DOI:10.16707/j.cnki.fjpc.2023.03.023.
[8]陈挺木.一种疫情防控用服务机器人系统的设计与验证[J].机电工程技术,2022,51(12):241-243.
项目来源:大庆市指导性科技项目,项目编号:zd-2023-27

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



