郑州铁路职业技术学院 451460
摘要:本文采用类陀螺仪装置,对保护笼里的无人机稳定性进行分析。首先介绍了类陀螺仪的基本原理和特点,然后将无人机放入保护笼中进行稳定模拟实验,最后通过模拟实验,以最稳定的点位来安装无人机,以防无人机在危险环境中出现故障。
一、引言
无人机作为一种新型的飞行器具,具有灵活性高、成本低、应用范围广泛等优势,因此在农业、测绘、通信、应急救援等领域得到了广泛的应用。然而,无人机在飞行中常常会受到外部干扰,如风力、突发的天气变化、其他飞行物体等,容易导致意外碰撞和损坏,从而影响了无人机的运行安全和稳定性。为了解决这一问题,本文提出了一种基于类陀螺仪装置的无人机保护笼设计,并对其应用进行了研究。
二、类陀螺仪装置的原理及特点
类陀螺仪是一种通过旋转惯性实现稳定性控制的装置,其原理类似于陀螺仪。在无人机保护笼设计中,我们利用类陀螺仪的稳定性和自旋特性,设计了一种能够自动调整姿态、保护无人机免受外部干扰的保护笼结构,模型如a。其主要特点包括:
(1)内置类陀螺仪装置,实现自动稳定控制;
(2)轻量化设计,不增加无人机额外负载;
(3)灵活性高,适用于不同类型的无人机。
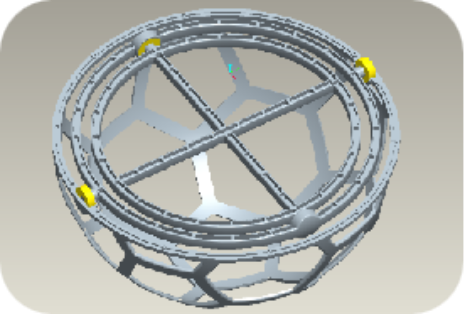
图a 类陀螺仪模型图
三、基于类陀螺仪装置的无人机保护笼设计
基于以上原理和特点,我们设计了一种基于类陀螺仪装置的无人机保护笼。该保护笼采用轻质材料制造,内置类陀螺仪装置,并与无人机飞行控制系统相连。当无人机受到外部干扰时,类陀螺仪装置会自动感知并调整保护笼的姿态,保护无人机免受碰撞和损坏。同时,该保护笼还考虑了空气动力学特性,尽量减少对无人机飞行性能的影响。设计如图b。
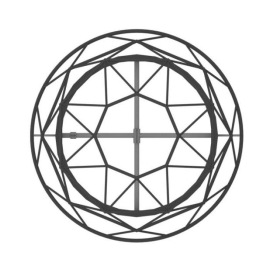
图b 无人机保护笼设计图
四、应用研究
为验证基于类陀螺仪装置的无人机保护笼设计的有效性和可行性,我们进行了一系列实验和性能测试。通过模拟外部干扰情况下的飞行试验,结果显示,该保护笼能够有效地保护无人机免受外部干扰,提高了无人机的飞行安全性和稳定性。同时,我们还针对不同类型的无人机进行了应用研究,结果表明,该设计具有一定的通用性和适用性。
4.1陀螺仪的稳定性
为了确保我们的设计稳定,我们从内部类陀螺仪的稳定性来分析。我们编制了一个代码,通过创建陀螺仪来模拟数据读取过程,循环100次,并观察测量值,选择使用Python。代码见附录。
结果表明陀螺仪在大环境中如:温度变化、湿度变化、震动和风速变化等环境都可以表现出其输出稳定及准确。
4.2无人机的稳定性
无人机在飞行中,气流对其飞行时会造成影响。当无人机在保护笼中,气流在笼中存在气流,最极端的情况是出现气旋,我们通过测流仪器测出一下数据如表1,
表1 无人机转速与气流速度数据
无人机转速(r/min) | 气流速度(m/s) |
269 | 6.3 |
310 | 6.4 |
330 | 6.7 |
337 | 6.9 |
350 | 6.9 |
397 | 7.4 |
421 | 7.6 |
584 | 7.8 |
598 | 8.1 |
602 | 8.1 |
690 | 8.3 |
829 | 8.5 |
854 | 9.2 |
996 | 9.4 |
我们建立线性回归模型,通过SPSS,使用Pearson分析,可以得出无人机转速与气流速度为一个递增趋势,也就是当无人机转速越快,周围空间内气流速度越大,再通过函数拟合,其![]() =0.9547,拟合结果接近于1,说明我们的无人机稳定性能优秀。
=0.9547,拟合结果接近于1,说明我们的无人机稳定性能优秀。
五、结论
基于类陀螺仪装置的无人机保护笼设计是一种有效的无人机保护方案,能够提高无人机的飞行安全性和稳定性。未来,我们将进一步完善该设计,探索其在各种实际应用场景中的适用性,并推动其在无人机行业的推广和应用。
六、附录
import random
class Gyroscope:
def __init__(self):
self.bias = 0 # 漂移
self.noise = 0 # 噪声
def read_data(self, rotation_rate):
# 模拟陀螺仪数据读取
noisy_measurement = rotation_rate + random.gauss(self.bias, self.noise)
return noisy_measurement
# 创建一个陀螺仪实例
gyro = Gyroscope()
# 模拟不同条件下的数据读取
for _ in range(100):
rotation_rate = 10 # 模拟实际旋转速率
measurement = gyro.read_data(rotation_rate)
print(measurement)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



