辽宁科技学院 117004
摘要:随着我国空巢老人数量的日益增加,老年人生活中需要提供陪伴和帮助的需求越来越大。本文设计了一款智能陪护机器人,专门针对中国空巢老人的需求进行了定制。本系统满足了个性化护理、娱乐和协助等功能,提升空巢老年人的生活幸福感。并且该机器人的设计考虑了中国独特的文化、社会和经济因素,使其成为了空巢老人面临挑战的合适且有效的解决方案。通过提供情感支持、日常生活协助和社交互动,智能陪护机器人有望成为中国空巢老人生活中的重要伙伴,为他们带来更多的关怀和舒适,也让外出打工的子女更加放心。
关键词:陪护、机器人、社交互动
1、引言
随着中国人口老龄化的加剧,大量年轻人外出务工,使得空巢老人群体的数量不断增加。这一人口群体面临着诸多挑战,包括孤独、抑郁、日常护理等需求。传统的养老模式已经无法满足多样化需求,因此需要新的解决方案来改善他们的生活质量和幸福感。智能陪护机器人作为一种新型的护理方式,具有潜在的巨大优势,可以为老人提供个性化的护理、情感陪伴和社交互动,以弥补传统护理的不足。因此,设计一款专门针对中国空巢老人需求的智能陪护机器人成为了当前待解决的问题。本文旨在探讨如何利用先进的技术和人工智能算法,为中国空巢老人设计一款符合其特定需求的智能陪护机器人,以提高他们的生活质量和幸福感。
2、文献综述
目前关于机器人在老年护理中的研究主要集中在探讨机器人如何提供支持和服务,以帮助老年人应对日常生活中的需求和挑战。
在中国老龄化下,空巢老人成为一个重要的研究对象。由于中国经济发展和人口结构的变化,空巢老人所面临独居带来的孤独和社交隔离问题日渐增加。
对于老年人来说,语言、文化和技术接受程度等因素需要被考虑。机器人应该能够与老年人进行有效的交流,理解他们的需求和意愿,直接了当解决问题。
此外,安全和隐私保护也是陪护机器人设计中需要考虑的重要因素。确保机器人不会对老年人造成伤害,同时保护老年人的个人隐私,是必须要解决的问题。
综上所述,机器人在中国空巢老年护理中具有巨大的潜力。未来的研究应该继续关注中国老年人的特定需求和挑战,并在陪护机器人的设计中考虑文化和社会因素,以提供更好的支持和服务。
3.设计需求
美国心理学家马斯洛亚伯拉罕·马斯洛(Abraham H.Maslow)在 1943 年提出了马斯洛需求理论,他认为通常人们在基本需求满足的情况下进而会追求更高精神层次的需求,由初期的衣食住行到体现生命价值。并且将人的需求从低到高分为五个层次,依次为生理需求、安全需求、社交需求、尊重需求、自我实现需。本节利用该理论对老年人的心理特征进行分析,通过归纳总结,提出产品的设计启发。
(1)生理需求
生理需求一般包括衣食住行,随着身体的不断衰老,老年人的日常生活起居也会越来越困难,一方面腿脚不便活动能力较弱,另一方面学习认知能力不足,导致很难融入数字化生活。特别是在新冠肺炎疫情的背景下,为了避免人员聚集,很多便民的服务窗口由线下变为线上,例如餐馆点菜、医院挂号预约、缴纳水电费、医疗保险服务、买菜等。传统的生活方式在时代发展下开始慢慢转向数字化社会,使得老年人很难适应,容易产生焦虑、自我否定等消极心理[2]。
(2)安全需求
安全需求分为生理安全与心理安全。生理安全例如,疾病、跌倒伤害等。居家老年人由于缺乏看护,遭遇跌倒事故往往会造成无法估量的伤害,所以安全监测与报警系统显得尤为重要,能够有效减少跌倒事故带来的二次伤害。另外,还需根据老年人需求适当增加安全辅助功能心率、血压、备忘录提醒;心理安全方面,老年人对新鲜事物接受较慢,产品外部形象要符合老年人的审美标准,另外老年人有时候会因为产品操作使用困难造成心理压力,极易产生挫败感导致失去使用产品的兴趣。
(3)社交需求
在社会交流方面,由于老年人生活范围逐渐缩小,朋友圈也比较窄,因此需要与老年人构建社交联系,使居家老年人能够及时分享生活中遇的问题与想法建议,给予老年人更多的理解和关怀,满足老年人居家养老的精神世界。在情感关系方面,由于子女忙于工作无法陪伴左右,这使得老年人与子女交流产生代沟,长此以往使得老年人内心缺乏关爱,幸福感降低。配偶和子女是居家老年人最为信任的情感来源,他们的体贴问候、关心照顾能够极大满足老年人对亲情的渴望与爱的需求。
(4)尊重需求
尊重需求不仅包含自尊,还包括了得到他人的尊重希望得到家人和社会的认可。由于老年人生理机能逐渐衰退、记忆力认知水平也不断下降,再加上退休之后社会角色的转变,产生强烈的失落感,一些老年人往往出现自卑和抑郁情绪。在面对新的事物或者困难往往不知所措,导致老年人自尊心受挫。因此在设计居家老年人跌倒的视频看护机器人过程中,应注重产品的易用性,操作简化、界面简洁、大型字号,尽最大可能降低了用户操作门槛,优化用户体验。
(5)自我实现需求
自我实现需求是实现自我的价值,从而得到精神的满足。实证研究发现,情感、社交、文化、娱乐、自我实现是大部分老年人的向往。老年人希望在退休后继续为社会服务,例如参与邻里互帮、安全知识宣传、健康讲座,或者将自己的知识技艺得到传承,为社会的发展贡献力量,从而实现自我价值,获得精神上的满足,因此在产品的功能实现上要简单直观,方便老年人操作、掌握,满足老年人自我实现的需求。
4.设计概念
功能是产品设计的核心。如果产品没有良好的功能,将失去核心竞争力,也必将被市场淘汰,因此明确产品使用功能是产品设计的首要任务。对于居家老年人的看护机器人设计,需要满足老年用户的生理需求和精神需求。
一、用户需求分析
(1)生理需求方面,看护机器人是为了在老年人发生危险后迅速报警以及为老年提供生活便捷,减轻老年人的生活负担。因此,居家看护机器人应该满足解放用户体力、部分脑力的生理需求,致力于解决生活中部分困难使得老年用户的生活更加轻松,提高其生活品质。
(2)精神需求方面,随着数字化的快速发展,人们的生活理念随之改变,看护机器人不仅仅在生理需求方面为老年用户提供帮助,还需要满足老年用户的精神需求,缓解老年用户的孤独感、寂寞空虚的消极情绪,给予他们慰藉从而提升其精神享受。另外在产品色彩、材质、造型方面也需要符合用户的精神需求,让产品融入到用户的生活中去,从而更好的服务用户[3]。
二、外观设计
外观设计考虑老年人的审美习惯,以及使用的舒适性和易用性。将机器人设计得简洁大方,色彩温和,避免过多的复杂元素。同时,注意细节处理,如圆润的边角,避免磕碰。这有助于老年人产生亲近感,并让他们更容易接受和使用机器人。机器人的尺寸和重量应该适中,既要足够稳定坚固,又要便于老年人移动和携带。过大或过重的机器人可能对老年人造成不便和不安全的因素。
三、交互界面设计
交互界面应直观易用,便于老年人操作。拥有易于操作的控制面板,机器人的控制面板应该设计简单易懂,按钮应该大而明显,使用简单直观的图标和文字标识。这样老年人可以轻松地操作机器人,并使用它提供的各种功能。包含语音识别和语音反馈功能,降低使用门槛。此外,界面设计还应考虑老年人的视觉和触觉特点,优化操作特点。
四、运动能力设计
老年伴侣机器人应具备良好的运动能力,能在室内环境中自由移动。这需要我们设计出稳定、灵活的运动系统,以适应不同的地形和环境。可以设计成拥有轮子或腿,以便在房间之间移动或陪伴老年人进行户外活动。
1.步行和平移能力:机器人可以设计为具备步行或平移的能力,以便在室内和室外进行移动。这样的设计可以让机器人随时陪伴老年人走动,提供支持和安全感。
2.运动平滑和稳定:机器人的运动应该平滑和稳定,以减少老年人的不适感和恐惧感。例如,机器人可以配备防震装置和自动调节平衡的技术,以确保在移动和转向时能够提供稳定的体验。
五、感知能力设计
1.视觉感知:机器人可以配备摄像头和图像处理技术,以便识别人脸、表情和手势。这有助于机器人更好地与老年人进行交流,并根据他们的表情和动作作出相应的反应。
2.声音感知:机器人具备麦克风和声音识别技术,可以识别老年人的声音并进行语音交流。此外,机器人还可以使用声音传感器来侦测房间的声音水平,以提供更好的周围环境感知。
3.环境感知:为了更好地适应老年人的需求,机器人可以配备环境传感器,检测室内的光线、温度和空气质量等因素。这样的感知能力可以帮助机器人提供更好的自适应服务,例如调节室内照明、提醒老年人注意室内温度等[4]。
4.社交感知:机器人可以通过社交感知技术,如自然语言处理和情感识别,理解和应对老年人的情感需求。它可以识别情绪表达,提供安慰和支持,或者在老年人表现出需要交流的时候提供陪伴和对话。
六、安全性与稳定性考虑
在设计中,我们必须考虑机器人的安全性与稳定性。这包括物理结构的安全性,以及软件系统的稳定性。我们需要确保机器人在各种情况下都能安全、稳定地运行[5]。
1.避障和碰撞检测:机器人应该配备避障传感器,能够识别障碍物并避免碰撞。它还可以使用视觉感知技术,如摄像头和深度传感器,以便更好地感知周围环境,从而提供更安全的导航和移动。
2.紧急停止按钮:机器人应该配备紧急停止按钮,以便用户在需要时能够立即停止机器人的动作。这为老年人提供了不受控制的情况下的安全保障。
3.数据隐私与安全:在机器人处理和存储用户数据时,应该采取适当的隐私保护措施。机器人应该遵守适用的数据保护法规,并采取密码保护、数据加密和安全传输等措施,以确保用户数据的安全性和私密性。
4.应急情况处理:机器人应该具备应对突发情况的能力,例如漏电、火灾、翻倒等。它可以配备相应的传感器和报警装置,以及与家庭安全系统集成的功能,及时发出警报并采取适当的措施以确保用户的安全。
5.软件和固件更新:定期更新机器人的软件和固件可以修复安全漏洞和改进性能,应该确保用户可以轻松地进行更新,或者设计自动更新机制。
5、实施
随着社会的发展,越来越多的年轻人选择在大城市工作,导致空巢老人数量不断增加。为了解决这个问题,我们设计了一款专为空巢老人服务的智能陪伴机器人。该机器人集成了多种特性和功能,包括语音识别、人脸识别、健康监测等,旨在为空巢老人提供全方位的陪伴和关爱。
一、硬件组件
老年机器人的硬件组件的设计和整合是为了满足老年人的特殊需求和提供全面的支持。这些元素共同协作,使老年机器人能够与用户互动、提供信息和娱乐、监测健康等,从而根据老年人的需求提供个性化的服务和帮助。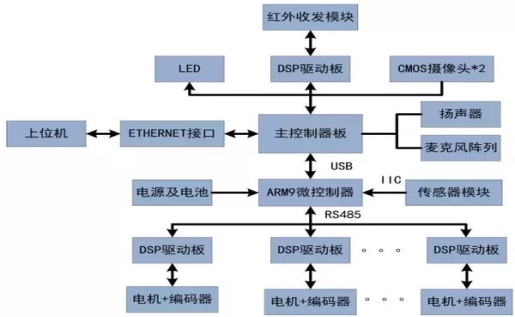
二、软件组件
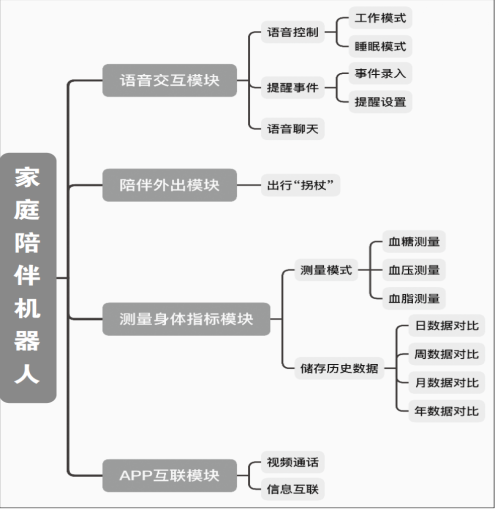
三、特性和功能
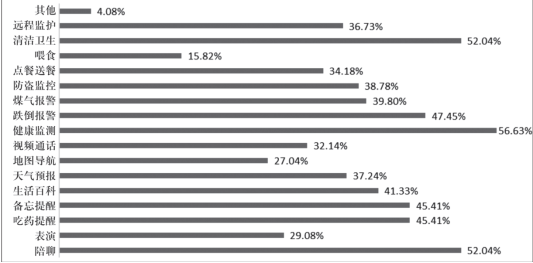
300名空巢老人及家属对机器人的功能要求
五、总结
本次评估工作旨在了解中国空巢老人智能陪伴机器人的性能表现以及在满足空巢老人需求方面的有效性和可用性。通过用户测试和目标人群反馈,我们获得了宝贵的数据和意见。根据评估结果,我们提出了针对性的改进建议,旨在优化机器人性能,提高其在空巢老人市场的竞争力。未来,我们将继续关注市场需求和技术发展,不断推动机器人产品的创新和升级。
7.结论
机器人主要是增加老年人的独立性和自主性。通过机器人的帮助,使老年人可以更独立地生活和处理日常任务,不在完全依赖他人的帮助。在这个社会老龄化严重的环境下,照顾老人的责任通常是由家人或专业护理人员承担,而陪伴型机器人可以减轻这些照顾人员的负担,使他们能够更好地平衡工作和生活。而且机器人可以全天候的为老年人提供支持和照顾,无论是在日常活动、医疗照护还是心里支持方面,都可以随时提供帮助。
针对年轻人忙于学业和工作,分身乏术、无暇陪伴父母等不容忽视的问题,可通过本款老年人智能陪伴机器人的交互行为来解决,同时后续会根据使用者的使用情况及建议进行整改。智能机器人作为新一轮科技革命和产业变革的重要前沿和热点,以用户体验为中心,获取用户需求要点,并根据用户需求,进而完成产品概念设计,最终完成老年人智能陪伴机器人的设计实践。本款老年人智能陪伴机器人让子女了解父母的最新情况,为老年人提供多样化的服务需求,为老年人智能陪伴机器人的设计提供了一定的方向和建议,具有一定的研究价值[7]。
参考文献:
[1]向运华;王晓慧.人工智能时代老年健康管理研究[J].新疆师范大学学报(哲学社会科学版),2019-05-08
[2]王小红.针对居家养老的老龄护理产品设计研究[D].广东工业大学,2015-05-01
[3]江加贝;孙童心;郑址洪.面向居家养老人群的精细化智能服务设计研究[J].南京艺术学院,2022-05-15
[4]张昊.智慧养老视域下中国养老服务体系的优化路径研究[D].吉林大学,2020-12-01
[5]陈春杰.基于柔性传动全身外骨骼机器人系统研究[D].中国科学院大学(中国科学院深圳先进技术研究院),2017-10-01
[6]金信琴;滕悦.基于空巢老人群体的陪伴互动产品设计研究[J].哈尔滨理工大学机械动力工程学院,2021-02-28
[7]杨婷;秦思怡;刘佳怡.老年人智能陪伴机器人策划及营销方案的初步设计[J].互联网周刊,2022-11-05
作者简介:第一作者 陈棚 2004.07.19 男 四川省自贡市 汉族 辽宁科技学院 研究方向:机器人设计
第二作者 周娜 1984.1.7 女 山东省章丘市 汉 硕士 讲师 辽宁科技学院 研究方向:图像处理、机器视觉、机器人视觉检测

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号