天津港集装箱码头有限公司 天津 300450
摘要: 随着现代船舶制造技术水平的提高,船舶体型越来越大,船舶的集装箱载容量也越来 越大。随之而来的, 装卸集装箱的岸桥的高度也越来越高,两者相互配合, 极大地提高了集 装箱的运输效率。但是, 司机室一般是安装在岸桥的顶部大梁上, 位置很高,距地面高达五 六十米,吊具还可以深入船舱二十米左右,如果当吊具深入到船舱时, 那么吊具到司机室的 距离可达七八十米,如此长的距离可能会导致司机看不清吊具与集装箱的状态, 即影响生产 的速度,又存在着一定的安全隐患。因此,为大型岸桥配置一套吊具跟随系统, 使得摄像头 能够随吊具的上下运动自动变焦,且始终跟踪摄影, 司机通过司机室内显示器清晰的观察吊 具运行状态,能够准确高效的操作吊具来完成集装箱的装卸是很有必要的。
关键词: 岸桥; 吊具;摄像头; PLC
1.引言:
本文介绍的岸桥吊具镜头自动跟踪控制系统,系统中的摄像机内安置连接有步进电动机 摄像机镜头组件,当吊具的上下运动时, 通过 PLC传输的吊具的高度模拟量数值来控制电 机运转来进行镜头焦距的调节, 并通过显示器展现在司机面前,这使得司机在视线上极大的 缩短了与吊具之间的距离,让司机操作更加安全、高效、灵活。本控制系统, 自动化程度高, 系统功能简捷, 司机操作方便, 为实用性极强的新型自动控制系统。
2.系统组成
岸桥吊具镜头自动跟踪控制系统是由摄像机、中央控制器、供电器、显示器和主控 PLC
组成。

图 1.1 系统结构组成
![]()
2.1 摄像机
摄像机内是由高精度镜头、控制电机、电源整流模块等组成,能够实现在中央控制器的 操控下,自动变焦, 捕获吊具的运行状态。
2.2 中央控制器
中央控制器由控制模块、驱动模块、控制按钮和机箱组成,并且是连接摄像机、供电器、 显示器和主控 PLC的中枢。中央控制器通过获取主控 PLC 计算出的吊具高度的模拟量输出 来控制镜头的变焦, 并且通过显示器显示摄像头所获取的画面。
2.3 供电器
电源提供 3 组输出电源;其中一组 DC5V 经过 3.3V 稳压后给控制板供电;一组 DC5V 给驱动板供电; 一组 AC24V 给前端摄像机供电。该供电器的使用不仅为设备提供了不同等 级的电压, 同时提高系统的稳定性, 为系统的稳定运行提供了保障。
2.4 显示器
摄像机捕获的影像通过显示器展示在司机面前,让司机能够直观的看到吊具的具体运行 状态。
2.5 主控 PLC
主控 PLC的作用是计算吊具的高度, 并将高度数值通过模拟量输出对应的 4-20mA 电 流给中央控制器,中央控制器获取电流后,进行计算并控制摄像机内的小电机来调节镜头来 实现变焦。
3.系统功能
本文介绍的控制系统采用嵌入式设计, 自动化程度高,系统功能简捷, 司机操作方便, 为实用性极强的新型自动控制系统。

图 2.1 控制器
在控制器面板上有 ZOOM IN (手动正向变焦调节)、ZOOM OUT(手动反向变焦调节)、 AUTO(自动模式选择)、MANAUL(手动模式选择) 五个按钮;绿色(手动状态指示灯)、
红色(自动状态指示器) 两个指示灯。
开机后 AUTO 键上方的红色指示灯亮,说明控制器在自动模式状态,在自动模式时中央 控制器统通过控制模块采集主控 PLC传输过来的 4-20mA电流的高度信号,再根据高度信号输出相应的控制信号经过驱动模块实施对摄像机镜头焦距变化的控制,当吊具上下移动时 屏幕中吊具的图像能平稳地保持在一定范围内相对不变,以达到吊具移动到远处时仍能清晰 看见运行状态的目的。控制器可设置手动和自动两种状态,设置在手动状态时其按纽上方的 绿色指示灯亮, 可用机箱面板上的 ZOOM IN 或 ZOOM OUT 按钮调节按钮调节摄像机镜头 的焦距,变回自动状态后屏幕上吊具画面将回到吊具实际所在高度位置的画面状态。
4.系统调试
本控制系统采用 CameraDataAcquisition软件进行调试,采用USB 数据线进行调试数 据传输,方便快捷。首先将调试 PC连接到控制器,然后打开软件,开始准备调试(以起升 高度 46 米为例子)。
把吊具升到上停止高度(此时电流值约在 4mA左右)用鼠标点击对话框中的“系统复
位”出现下面的对话框, 然后点击对话框中的“开始采集”来开始数据的采集工作。

图 3.1 系统复位
吊具在 46 米时, 观察显示器中的吊具是否在屏幕中央, 其图像大小是否合适,此时可 以通过调整云台的参数来修正位置,调整变焦参数来修正图像的大小,最终使得显示器中的 图像清晰且大小适中,然后按确认键继续下一步。
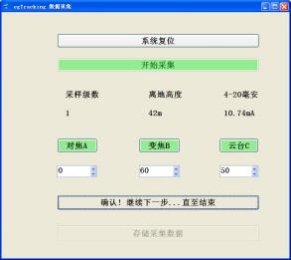
图 3.2 参数调节
把吊具下降 4 米, 降到 42 米继续调整云台和变焦的参数, 按确认键继续下一步, 再把 吊具下降 4 米, 降到 38 米继续调整云台和变焦的参数, 依次类推, 直至整个数据采集过程
结束。此时点击“存储采集数据”来将采集到的数据进行保存。移去 USB数据线,将控制器 断电后再重新开机, 控制系统运行在自动状态,整个调试过程结束。
5.结束语
本文介绍的吊具镜头自动跟踪系统,具有系统简洁,调试步骤简单,可操作性强等优点, 该系统的使用,极大的方便了司机对于吊具远距离时状态的观察,让司机操作更加高效、安 全,很大程度上增加了码头的工作效率。后续运用过程中还可以通过采用更加精密的镜头以 提高图像的清晰度,还需要对控制器内置程序进行调节, 使得图像在吊具运行过程中更加平 稳,以此来达到更好的效果。
参考文献:
[1]王胜. 基于机器视觉的轮胎吊自动化关键技术研究[D]. 2016.
[2]曹乐, 叶建勇. 摄像头监控系统在自动化轨道式起重机上的应用[J]. 机电信息, 2015(15) :40-40.
![]()

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



