雷达新能源汽车(浙江)有限公司
摘要:紧急情况下驾驶员能否做出准确、及时的判断和操作,对于防止交通事故具有重要的现实意义。为保证车辆行驶的安全,采用一种可以实施混合学习算法的自适应神经—模糊推理系统(ANFIS)结构,对车辆纵向运动跟车间距控制问题进行了研究。设计了基于ANFIS结构的跟车间距控制器,通过仿真对ANFIS结构控制器中的各参数进行了优化。建立了基于高斯型函数作为隶属度函数的车间距离控制器模型,运用前后两车的速度差与距离差的变化情况对后车的加速度进行控制,并通过混合法对系统进行了在线优化。
关键词:安全距离;模糊推理;车辆跟驰;神经模糊推理;仿真;优化
引言
日益增多的交通事故已成为严重的社会问题,降低交通事故的损失和伤害有待解决。而在同样的道路上提高交通流量,其关键之一就是要提高车速和减少车间距。上述两种情况是互相矛盾、互相关联的。如何尽可能多的考虑驾驶行为的影响,既保证安全的车辆跟驰距离,又不影响交通流量,具有重要的意义。
模糊控制技术的特点在于逻辑推理,即获取人类专家的结构化知识,模拟人抽象思维的能力,神经网络在实时学习和自动模式识别方面有极强的优势,因此将两者有机结合组成神经模糊控制系统,可以有效地发挥模糊控制与神经网络控制的各自优势,并弥补各自不足。本文采用一种功能上与模糊推理系统等价的自适应神经—模糊推理系统(ANFIS),它表示基于自适应网络的模糊推理系统或自适应神经模糊推理系统。
1.1基于ANFIS的模型学习和推导
MATLAB的模糊工具箱提供了辅助自适应神经网络模糊推理工具的主要函数anfis,其实质是借用神经网络中比较成熟的参数学习算法------反向传播算法或是最小二乘的反向传播算法,对一组给定的输入输出数据集进行学习来调整模糊推理系统中变量的隶属度函数的形状参数,从而计算出隶属度函数的最佳参数。利用MATLAB工具,并不用去钻研复杂的自适应理论,也不用对神经网络的知识或是其学习算法有很多了解,我们就可以设计出具有数据学习调整能力的模糊推理系统。MATLAB模糊工具箱中提供了命令函数anfis和图形化工具函数anfisedit,它们通过自适应神经网络学习的方法获得模糊推理系统的隶属度函数的参数[1]。
本文将构造一个二维的模糊控制器,以前后车车距与安全距离的偏差(DS) 及前后车车速之差(后车速度减前车速度RV)作为前件变量,而以后车的加速度(AFV)作为系统的输出。
模糊语言即为模糊状态或模糊集合。模糊语言选择的多,说明变量可以用较多的模糊状态来描述,制定规则时就比较灵活,规则也比较细致,但可能会使规则变得比较复杂。选择词汇过少,使得对变量的描述变得粗糙,导致控制器的性能变坏。所以选择模糊语言时要适当,需要兼顾简单性和灵活性。
在本文中,对于DS,RV, AFV,我们都选择了这七个词汇,一般用英文字头缩写表示为: {NB,NM,NS,O,PS,PM,PB }选用高斯型隶属函数作为输入,输出模糊变量的隶属函数,解析式如下:
 (1)
(1)
其中,μ、σ是高斯型隶属函数的两个参数,分别表示隶属函数的中心和分散程度。参数σ的大小直接影响隶属函数的曲线形状,而隶属函数曲线形状不同会导致不同控制特性。隶属函数曲线形状较尖的模糊子集,其分辨率较高,控制灵敏度也较高;反之,隶属函数曲线形状较缓,控制特性也较平缓,系统稳定性较好。因此,在选择模糊变量的模糊集的隶属函数时,在误差较大的区域采用低分辨率的模糊集,在误差较小的区域采用较高的分辨率的模糊集,当误差接近于零时,选用高分辨率的模糊集,这样才能达到控制精度高而稳定性好的控制效果。
综合以上规律,并根据实测数据和专家提供的输入输出数据对,对本文利用MATLAB的模糊工具箱里提供的anfis,来确定隶属度函数,及其形状参数。由此得到如下各个语言变量模糊子集的隶属度函数。由此得到如下各个语言变量模糊子集的隶属度函数


图1 输入DS的隶属度函数 图2 输入RV的隶属度函数
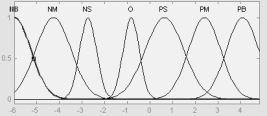
图3 输出AFV的隶属度函数
根据已确定的输入输出变量,我们可以确定具有如下形式的模糊If-Then规则:
![]()
其中:![]() 分别为距离差,速度差及后车加速度的模糊集。基于此,我们可以根据经验确定模糊控制规则。当距离差较大时,应选取加速度为负大以尽快消除距离差,避免追尾事故的发生;当距离差较小时,应以系统的稳定性为前提选择合适的加速度。车间距离控制器本质上是一个距离控制系统,它主要根据RV和DS对后车的加速度进行控制,使前后两车始终保持安全距离。本文采用高斯型隶属函数,并采用乘积推理机,单值模糊器,中心平均解模糊器,得其输出为:
分别为距离差,速度差及后车加速度的模糊集。基于此,我们可以根据经验确定模糊控制规则。当距离差较大时,应选取加速度为负大以尽快消除距离差,避免追尾事故的发生;当距离差较小时,应以系统的稳定性为前提选择合适的加速度。车间距离控制器本质上是一个距离控制系统,它主要根据RV和DS对后车的加速度进行控制,使前后两车始终保持安全距离。本文采用高斯型隶属函数,并采用乘积推理机,单值模糊器,中心平均解模糊器,得其输出为:
 (2)
(2)
本算法的仿真是在Matlab/ Simulink
环境下进行的。其设计结构图如图4所示[4]:
图4 仿真模型设计结构
下面对驾驶行为进行仿真实验:
前后两车的初始间距为40m,前后车的初始速度为36km/h(10m/s),前车突然刹车制动,以![]() 的减速度行驶。如图,横坐标是时间(秒)。纵坐标是速度差。(m/s)
的减速度行驶。如图,横坐标是时间(秒)。纵坐标是速度差。(m/s)


图5 相对速度随时间变化图 图6 车间距离随时间变化图
前后两车的初始间距为80m,前后车的初始速度为108km/h(30m/s),前车突然刹车制动,以![]() 的减速度行驶。
的减速度行驶。


图7 (2)的相对速度随时间变化图 图8( 2)的车间距离随时间变化图
本文对车辆跟驰过程中的驾驶行为进行了简要分析,指出驾驶行为具有不确定性,并且这种不确定性可以用模糊推理理论进行研究;其次,本文考虑行车安全距离的概念,对车辆跟驰安全距离的控制提出了模糊控制算法,并进行了仿真试验。通过仿真结果我们可以看到,用模糊推理理论模拟驾驶行为的不确定性可行,在两辆车跟驰行驶情况下,在前车出现突然刹车的情况下,本文所设计的控制器都能在很短的时间内对后车的速度进行控制,实现后车的安全停车,避免追尾碰撞事故的发生。由仿真图可以看出:当两车初始间距较大时,前车刹车制动情况下,两车相对速度的变化不是很剧烈,由此可判断后车也实行了平稳减速,当前车停车时,后车还具有一定速度,它将继续减速行驶至停车,并与前车保持一定的安全距离。证明了所设计的模糊控制器的有效性和实用性。
参考文献:
[1] 申瑞玲。车距的模糊自适应控制及其应用研究[D],东南大学,2006,1-10、23-28。
[2] 丁卫东,柳祖鹏,朱晓宏。车辆纵向运动跟车间距控制的研究[J],中国机械工程,2004,15(11)。
[3] 吴光强,张亮修,刘兆勇,郭晓晓.汽车自适应巡航控制系统研究现状与发展趋势[J].同济大学学报(自然科学版),2017,45(04):544-553.
[4] 王虎,贺沅玮,余有粮,喻煜烽.基于机器视觉技术的前方车辆检测与车距测量算法设计[J].内燃机与配件,2022(13):5-7.DOI:10.19475/j.cnki.issn1674
-957x.2022.13.004.
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



