同济大学浙江学院,浙江嘉兴,314001
摘要:本文设计一套机电一体化综合实验平台,包括硬件搭建和软件平台设计两方面内容。硬件这块包括:计算机及控制网络,固高运动控制器,伺服电机,伺服控制器,皮球和滑轨组成。软件平台主要是由固高科技提供的Otostudio软件,主要在该平台上构建实验上位机模型并完成控制程序编写与调试。学生可以在本实验平台上完成多种实验,包括一些基础的伺服电机的单电机控制,多电机协同控制。
1、课题背景
实验系统中,伺服控制系统是机电控制系统中重要的一环,尤其在高精度控制领域得到广泛的运用,大部高校机电教学中专门针对伺服控制的实验平台比较匮乏,针对该现况,设计了一套基于固高运动控制器的伺服控制实验系统。该系统机械结构包括同步带滑台、伺服电机和一块柔性承载平台。硬件部分由固高运动控制器、PC主机、伺服控制器构成;软件平台采用固高OtoStudio开发平台。测试表明该系统可完成单轴位置、速度控制和多轴联合运动控制实验。
针对传统有线水质监测系统数据准确度低、通信成本高、监测时间长等不足,提出一种基于无线传感器网络的水质监测系统。系统以 CC2630 芯片作为控制核心,在数据采集层完成对水体温度、pH 值、溶氧值的采集,数据经 GPRS 网络传输到 AP 节点汇集层,经汇总处理后被远程传输到上位监控层,由管理部门对水质进行实时有效的监管。完成了系统的硬件和软件设计,分析了 ZigBee 网络的组网原理。测试结果表明,该系统能满足水质监测领域的设计要求,具有广泛的应用价值
实验教学是整个高等教育创新体系中的一个重要组成部分[1],实验教学对学生综合素质的提高,对学生理论联系实际品格的塑造,对学生创新精神与实践能力的培养,对整个高等教育应用型人才培养模式的转变等方面有着举足轻重的作用[2-4]。根据国外知名大学(以机械专业闻名全球的大学):如佐治亚理工学院与密歇根大学安娜堡分校对近机械、机械类的本科生培养要求【5-6】,以Design & Manufacturing为主线,培养出能参与产品相应的制造系统的研发设计及制造的高精尖的学生,这就要求学生具有理论基础的同时兼具较强的机电液综合理论知识应用,包括控制、液压、机械等方面的综合创新实践的思维。同样,国内对综合实验教学的重视越来越高,如西南交通大学选修课除了可以选择理论课外,还可以选择一到两门个人实验研究项目,并且可以在理实一体化实验上,完成研究论文;清华大学成立了ICenter实验中心,供学生开放实验使用,并且可以根据学生的想法综合应用各种专业知识,进行创新实验、创新设计。
计算机控制系统是计算机技术和自动控制技术相结合的产物,随着高等教育改革的深入进行,社会对高等院校人才培养质量的要求不断提高。因此,作为将来从事计算机控制以及相关的工程技术人员,不仅要掌握计算机控制系统的基础理论、基本设计方法,还必须通过较完整的实验训练提高其综合能力和创新能力。
实验教学是工科院校人才培养过程中的重要教学环节,它能够使学生在具有一定的理论知识的基础上,掌握一定的实际操作技能,培养学生严谨、认真和实事求是的科学研究态度。通过实验教学,可以开拓学生的思维空间,使学生具备一定的观察问题、分析问题和解决问题的能力,即培养学生的综合实践能力及创新能力。其中,实验项目的开发和实践是实验教学的核心,实验项目一般分为基础性、验证性、综合性及设计性四类。很多高校仍停留在验证性实验阶段,也有一些高校对该课程实验做了很多改革尝试工作。
2.研究内容:
设计一套机电一体化综合实验平台,实验平台包括硬件搭建和软件平台设计两方面内容。硬件这块包括:计算机及控制网络,固高运动控制器,伺服电机,伺服控制器,皮球和滑轨组成。软件平台主要是由固高科技提供的Otostudio软件,主要在该平台上构建实验上位机模型并完成控制程序编写与调试。
通过多个伺服电机带动多条竖直方向的竖直滑轨,将一块非弹性方布的四个角固定在滑轨的运动模块上,通过控制每个伺服电机的运行参数,即可实现布匹上放置的皮球的运动轨迹。该实验平台能实现皮球的竖直上抛运动实验,可以通过改变实验参数,实现侧向既定角度抛球,可实现定点抛投等实验。
3、研究方法及取得成果
根据计算机控制理论,先进行实验平台搭建,编写相应的实验程序并完成调试。

图1硬件平台
硬件平台(图1)主要包括一台固高4轴控制器,和4套台达伺服电机,导轨4条,铝合金框架一套。
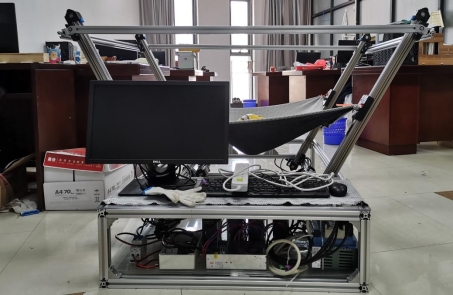
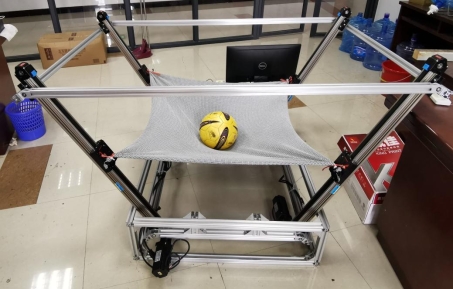

图2开发平台和上位机界面
开发环境是固高控制器的自带编程平台,可以调用厂商开发的函数库编写相应的控制程序,也可以在平台内进行上位机的开发。
此次自制教具研发项项目主要完成了对4轴的同步控制,实现皮球在竖直方向上的抛物运动控制。
4、结论与展望
本项目所采用的执行机构是伺服电机,伺服电机的运动精度非常高,而且可以实现闭环控制,在工控领域得到了广泛的应用。伺服电机作为机电一体化设备中的一个重要的执行元件,然而我校机电领域实验室中并没有相应的实验设备。所以自制教具项目整好弥补了当下实验室建设的空缺,学生可以在本实验平台上完成多种实验,包括一些基础的伺服电机的单电机控制(包括速度控制,位置控制),多电机协同控制(可以实现多电机的运动插补)。
初步实现了4电机的同步运行,能控制皮球的竖直上抛运动;指定角度抛投运动控制难度比较大,对控制理论要求较高,这也是后续研究的一个重要方向。
参考文献:
[1]席晓燕,张向红.机械基础课程“五位一体”实践教学体系构建的研究
[J].教育教学论坛,2018(17):198-199.
[2]孙博,王有军,何冰,熊晓航.机械基础实验教学改革探索[J].辽宁工业大学学报(社会科学版),2018,20(02):123-125.
[3]吕中亮,安培文,张海存,刘敏.基于项目驱动的机械基础实验教学改革与实践[J].教育教学论坛,2018(06):279-280.
[4]范茜.《机械基础》课程信息化教学设计研究[J].教育现代化,2018,5(06):157-159.
[5] 刘志强.高校实验室管理制度建设探析——评《高校教学实验室管理》[J].教育发展研究,2018,38(22):87.
[6]Fu, J.: Research on the Training ModeReform in the Higher Engineering Education.Dalian Universtiy of Technology 9,41–42 (2016)
[7]Ma, X.Y.: The Innovation of StudentManagement under the Reform of the CollegePersonnel Training Mode.Administration of Shanxi Institute 3, 40–43 (2016)
项目资助:同济大学浙江学院校级教改 (基于机电液综合实验项目化教学探索XNJG21006)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



