(中国电子科技集团公司第二十研究所,西安,710038)
摘要:目标轨迹信息表征目标的运动特征,通过预测轨迹数据可以对目标运动趋势进行预判,并实现对目标的定位分析。为此,本文利用LSTM神经网络对雷达采集目标轨迹进行预测,通过MATLAB编程对预测的轨迹数据进行验证。
1、引言
雷达采集的轨迹信息包含了目标的位置特征,通过对目标轨迹预测可实现对轨迹的精确定位。就轨迹预测问题而言,常采用以下几种方法进行处理,首先可利用时间序列ARIMA模型、回归模型进行轨迹预测,即根据输入输出关系分割出有效数据,并用最小二乘法对模型进行求解。其次可采用非线性回归、神经网络等模型进行轨迹预测分析,即将数据带入非线性映射关系,采用最小二乘法或梯度下降法对模型进行求解。考虑雷达轨迹数据的非线性以及不确定性,本文采用LSTM网络对雷达轨迹数据进行预测分析。
2、模型的建立
LSTM神经网络模型结构如图1所示,该网络结构包含三个门信息,即:遗忘门、输入门以及输出门。其中,遗忘门主要是控制遗忘上一层网络的数据特征的比例。输入门主要是筛选当前输入数据的有效特征,并结合当前数据对遗忘门的控制数据特征进行补偿与更新。输出们主要是根据遗忘数据特征与当前数据特征对模型进行学习、训练以及预测。在LSTM网络中,数据信息的流动分别由两条数据线驱动,其中一条数据线主要用于控制传输遗忘门的记忆数据,另一条数据线主要用于结合记忆数据对当前数据状态特征进行传输控制。针对该网络模型,LSTM具体的工作流程如下:
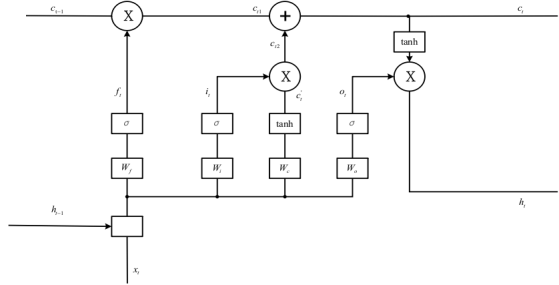 图1 LSTM神经网络结构图
图1 LSTM神经网络结构图
首先,给定t时刻的输入数据特征![]() ,将其与上一序列状态
,将其与上一序列状态![]() 加权求和,并分别放入遗忘门、输入门以及输出门,可以得到当前时刻t的遗忘门记忆数据特征
加权求和,并分别放入遗忘门、输入门以及输出门,可以得到当前时刻t的遗忘门记忆数据特征![]() 与当前时刻的数据状态
与当前时刻的数据状态![]() ,当数据经给遗忘门,得到遗忘门输出,见式(1):
,当数据经给遗忘门,得到遗忘门输出,见式(1):
| (1) |
式中,![]() 表示经遗忘门的数据特征输出,
表示经遗忘门的数据特征输出,![]() 表示遗忘门对当前时刻数据的加权系数,
表示遗忘门对当前时刻数据的加权系数,![]() 表示遗忘门对上一时刻状态的加权系数,
表示遗忘门对上一时刻状态的加权系数,![]() 为遗忘门数据偏置常量,
为遗忘门数据偏置常量,![]() 表示sigmod激活函数。
表示sigmod激活函数。
在此基础上,结合上一时刻的记忆系统数据驱动参数![]() 得到当前状态的主要的记忆细胞数据,具体见式(2)。
得到当前状态的主要的记忆细胞数据,具体见式(2)。
| (2) |
式(2)中,![]() 表示两数据集间点乘运算;
表示两数据集间点乘运算;![]() 表示当前时刻输入特征的记忆细胞状态数据。
表示当前时刻输入特征的记忆细胞状态数据。
当数据传输至输入门时,首先需要提取输入数据的数据特征,其次将对上一时刻记忆数据进行特征的进一步补偿。在该处理流程中,输入门的数据特征提取见式(3)。
| (3) |
式中,![]() 表示输入门中当前数据特征的权值;
表示输入门中当前数据特征的权值;![]() 表示输入门中上一时刻状态数据权值;
表示输入门中上一时刻状态数据权值;![]() 为输入门偏置常量。
为输入门偏置常量。
同时,输入门数据特征会在一定程度上给记忆数据特征进行补偿,因此需对输入门特征参数进行筛选,筛选控制系数求解见式(4)。
| (4) |
式中,![]() 表示输入门的特征筛选控制系数;
表示输入门的特征筛选控制系数;![]() 表示激活函数;
表示激活函数;![]() 表示当前时刻输入数据筛选控制权值系数;
表示当前时刻输入数据筛选控制权值系数;![]() 表示上一时刻数据状态输入筛选权值;
表示上一时刻数据状态输入筛选权值;![]() 表示筛选控制数据偏置常量。
表示筛选控制数据偏置常量。
接着,结合式(2)、式(3)可对输入门数据进行筛选控制,筛选方法见式(5),
| (5) |
式中,![]() 表示输入门筛选后的记忆参量补偿量,该数值将对上一时刻的记忆参量进行补偿。
表示输入门筛选后的记忆参量补偿量,该数值将对上一时刻的记忆参量进行补偿。
最后,利用式(6)得出当前时刻记忆参数的输出值。
| (6) |
式中,![]() 为当前时刻记忆参数输出
为当前时刻记忆参数输出
当数据经过输出门时,将数据特征![]() 以及上一时刻状态数据
以及上一时刻状态数据![]() 输入到输出门中,利用式(7)得到输出状态数据。
输入到输出门中,利用式(7)得到输出状态数据。
| (7) |
式中,![]() 表示输出门中当前时刻数据权值;
表示输出门中当前时刻数据权值;![]() 表示输出门中上一时刻状态数据权值;
表示输出门中上一时刻状态数据权值;![]() 表示输出门中偏置量;
表示输出门中偏置量;![]() 表示输出门中输出数据。
表示输出门中输出数据。
式(1)~式(7)给出了LSTM网络的前向传递过程,通过给定原始数据以及所求解的预测数据可得出LSTM的误差关系,见式(8)
| (8) |
式中,![]() 为t时刻的原始数据,结合式(8)分别求解该误差与LSTM网络各个参数的导数,并利用梯度下降算法可以对该模型进行训练预测,得到最优的LSTM网络参数。
为t时刻的原始数据,结合式(8)分别求解该误差与LSTM网络各个参数的导数,并利用梯度下降算法可以对该模型进行训练预测,得到最优的LSTM网络参数。
3、模型的求解
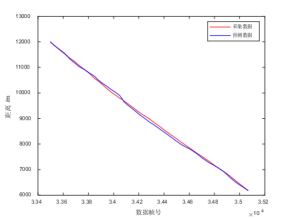
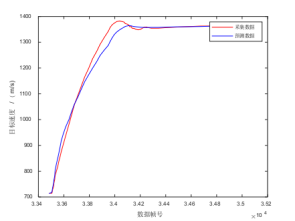
在上述理论基础上,本文就雷达采集的目标轨迹数据进行分析,通过MATLAB编程,得出图2与图3所示的目标轨迹采集数据与预测数据间关系。图2给出了目标的距离轨迹信息,该图中随着定时帧计数的推移,目标的距离数值不断减小,即目标逐渐靠近雷达。同时,目标的预测数据较好的表征所采集目标数据的运动趋势。图3给出了目标的速度轨迹信息,雷达跟踪的目标在帧号33500与34000之间速度不断的上升,并在34200帧以后跟踪速度稳定。由于该部分数据具有一定的非线性,LSTM网络较好的预测了目标的速度轨迹信息。
|
|
图2 距离轨迹预测 | 图3 速度轨迹预测 |
在上述仿真的基础上,本文对仿真模型进行了检验分析,进一步验证了距离轨迹、速度轨迹仿真结果的有效性,具体见表1-1
表1-1 距离轨迹、速度轨迹检验参数
类别 | SSE | MSE | R2 |
距离轨迹 | 1.72x105 | 4.3X103 | 0.9983 |
速度轨迹 | 3.35x104 | 577 | 0.9908 |
表中SSE为预测数据与采集数据的和方差,MSE为均方差,R2为决定系数,总的来说,在当前数据量级下SSE与MSE较小;同时R2较高表示预测目标轨迹效果较好,与采集数据较为一致。
4、总结
本文就雷达采集的目标轨迹数据进行分析,通过LSTM神经网络对轨迹数据进行了仿真,结果表明,LSTM网络对于轨迹预测效果较好。
5、参考文献
[1]侯立贺. 基于深度神经网络的轨迹预测方法研究[D].南京理工大学,2020.DOI:10.27241/d.cnki.gnjgu.2020.000458.
[2]陆佳欢,曹宇轩,羊钊等.基于LSTM的四旋翼无人机轨迹预测方法[J].哈尔滨商业大学学报(自然科学版),2022,38(06):699-704.DOI:10.19492/j.cnki.1672-0946.2022.06.004.
[3]刘龙庚,翟俐民,韩云祥.基于卷积LSTM模型的航空器轨迹预测[J].计算机工程与设计,2022,43(04):1127-1133.DOI:10.16208/j.issn1000-7024.2022.04.031.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号