航空工业沈阳飞机工业(集团)有限公司 辽宁省 110034
摘要:激光跟踪仪具有测量精度高、便携性好、量程大、动态、实时、高效等特点,特别适用于航空、航天、船舶、导航等诸多领域的测量任务。飞机安装到位后,需要对飞机起落架进行水平测量。起落架水平测量是指在飞机处于水平状态时,通过测量工具或设备检测飞机前起落架轴偏转、主起落架轴偏转和前主启动轮间距。文章重点分析激光跟踪仪在起落架水平测量中的应用展开分析。
关键词:激光跟踪仪;起落架;水平测量;应用
1激光跟踪仪的原理介绍
激光跟踪测量系统的基本原理是在目标点放置一个反射器,来自跟踪仪的激光击中反射器并返回到跟踪仪;当目标运动时,跟踪仪调整波束方向以瞄准目标,检测系统接收返回的波束,测量目标的空间位置。有两个垂直的正交旋转轴,每一个都有一个直接的、无刷驱动的直流电机和角度编码器来测量和计算跟踪仪的水平偏移角和俯仰角。汇总激光测距得到的数据后,由主机计算出测量点在当前工作坐标系中的位置。
2激光跟踪仪测起落架水平的优越性
2.1测量精度的提高
起落架的横向测量盘(工具),卷尺、棉线、铅锤,人为操纵时都会有一定的误差。该设备的标准测试面板为1016x260x2,其大小和厚度都很大,并且在测试盘上也有一个长方形的线框,用于测量。由于该测量盘本身制作有一定的误差,所以当安装了起落架的水平测量盘时,必须将其置于主起胎的投射下面的地上,所以,地面的水准偏差也会对其进行测量。在测量盘安装完毕后,利用装有棉花的铅球将各起落架轮胎上的轮叉从叉子的末端投射到测量盘的长方形框架中,而在投掷的过程中,所有的投射点都是人工控制的,而且投射点也是不同的。由于铅锤法的投掷也受到了大风和没有风力的干扰,所以铅锤法的实际操作受到了人为和外界的影响,其测试的准确率只有十分之一。采用激光跟踪法测量时,采用了轮叉(安装在轮轴中心)、 LeicaT-Probe和 Leica T. T. T- Cam,测量仪器的减少可避免多个系统错误的重叠, Leica TProbe无线,无臂,测量精度更高,而且它的前端探针与测量点采用点接触的方法,降低了人工误差,提高了测量速度。当采用激光跟踪仪建立重力平面时,采用气泡对平面进行校正,跟踪仪可以通过转动来确定气泡与圆的距离,并对其进行校正,而不会受到地表的横向偏差的干扰。因为每个测点的读数都是通过雷射跟踪仪提供的,所以它的误差只有一千分之一,所以其测量精度可以达到万分之一。
2.2测量周期的缩短
根据标准的测试板进行测试,因为前起和后起一共有三个测试板,前起落架和主起落架共6个轮子都要用铅锤进行投射,在投影的时候会受到一定的干扰,无法避免人工的反复,这个过程需要至少五个人同时进行,耗时和精力。同时,两个人站在主起处,两人站在前面,另两个人拿着一根棉线来测量轮距,这是一个耗时耗力的过程。根据以前的测试平板来进行飞机起落机构的横向测量,所用的时间最少要2小时。而激光追踪器则可以对特定的数据进行实时追踪,不需要反复地进行“测量、调节、计量”,只需要一个人拿着 LeicaT-Probe,另一个人负责采集数据。这样可以节省大量的人工和时间。根据实测数据,采用激光跟踪仪测量,只需要30分钟即可完成。
2.3操作步骤的简化
当采用横向测量仪测起落架时,必须将各轮子(总共6只)的轮轴中心投射到测量盘上,在实际工作中,每个人都要利用绳索的垂直度,通过铅锤的重量将其投射到测量盘上,由于人为的原因,必须反复进行投射,才能把最后的投射点固定下来,这是一个繁琐而重复的工作。但由于采用了X-Z面的平面,所以不需要任何额外的仪器和过程,只要用 LeicaT-Probe上的探测器与车胎上的测量点进行接触,就能得到相应的坐标,省去了繁琐的繁琐工作,减少了繁琐的工序,确保了数据的正确性。
3激光跟踪仪在起落架水平测量中的应用
将激光跟踪仪放在了机身后面,可以看到前起落架和主起落架的测试台,然后测重力场和引力座标系。采用0.5英寸口径的球体对飞机13、13'点至重力面的高度差异进行了测定和调节,使飞机在侧翼保持在同一高度;然后对飞机3、5号和重力平面高度进行了测试,通过对高度的测定和调节,使飞机的垂直高度维持在同一高度。
将 LeicaT-Cam安装在一个激光跟踪仪上,利用 LeicaT-Probe获取机身上3点、2点和4点的数据(如图1所示),由3个点构成一个与重力面相平行的平面,然后将2个点和4个点投影在这个平面上,以2个点为起点,以飞机2和4点投影点的连接点为反航线。由 LeicaT-Probe (每个获取测量点的位置参见图2)由激光跟踪仪在起落装置上分别测定"a1"、"a2"、"b1"、"b2"、"c1"和"c2"的座标。
利用激光跟踪仪主计算机装置上的 emson应用软件,将副点a3,b3,c3的座标(a3点是a1点和a2点的中间点,b3和c3的位置也是一样的)。
根据上述的各个测点和副位点的座标,采用下列的计算方法,得到了前后起落架与主落架的转轴偏移、相对飞机对称轴偏移、起落架的轮距数值。
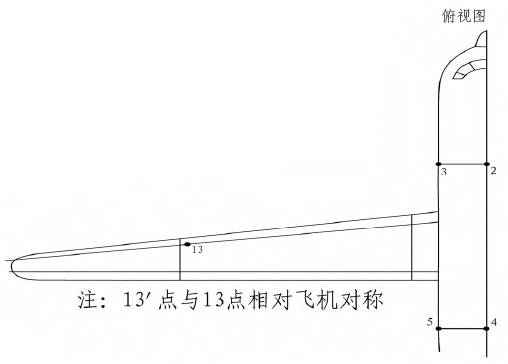
图1 机身测量点位置

图2 起落架上采集测量点位置
注:各点的坐标值通过LeicaT---Probe全部返回主机电脑的emson应用程序上。
说明:以下数值 Yx 为 x 点的 Y 轴坐标值,如:Ya3 为“a3”点的 Y 轴坐标值。
3.1前起落架轮轴的偏移计算
轮轴中心点相对于飞机对称轴线的偏移△ F=Ya3
轮轴轴线的垂直偏斜△H=|Za1-Za2 |
轮轴轴线的水平偏斜△R= Xa1-Xa2
3.2主起落架轮轴的偏移计算
左主起落架机轮轴线的垂直偏斜:△H =|Zb1-Zb2 |
右主起落架机轮轴线的垂直偏斜:△H =|Zc1-Zc2 |
左主起落架机轮轴线的水平偏斜:△R = Xb1-Xb2
右主起落架机轮轴线的水平偏斜:△R = Xc1-Xc2
3.3 起落架的轮距计算
在飞机坐标系统X0Y面上,“b3”和“c3”的投影点的连接被配置为直线L1,那么,左边 A的数据是在飞行器坐标系统X0Y平面上的投影点至L1的位置“a1”;A右边的数值是在飞机座标系统X0Y面上的“a2”的投射点与直线L1之间的位置。
测量的左主主架中央到飞行器的对称轴为| Yf|(理论 V)。
测量的右主架中央到飞行器的对称轴的长度是| Yg|(理论上的 V)。
综上所述,起落架的水平测量是航空发动机装配的一个关键环节,对飞机的飞行作业具有十分关键的意义。采用激光跟踪测量技术,克服了原有起落架水准测量精度低、操作步骤繁琐、测量时间较长等缺点,从而使起落架横向测量技术得以完善,同时也使制造进度和测量技术同步进步。
参考文献
[1]易思云,龙小辉.激光跟踪仪在CESSNA172飞机水平测量中的应用[J].技术与市场,2021,28(11):15-16+19.
[2]刘硕,刘光博,刘尚国,李华智.激光跟踪仪的测量误差解析与精度仿真[J].测绘工程,2021,30(06):21-26.
[3]关世超.DA42NG飞机起落架工作原理介绍及故障分析[J].科技资讯,2021,19(10):57-61.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



