丽水华阳电力有限公司 浙江 丽水 323400
摘要:在传统的配网带电作业中,操作人员需要站在绝缘升降斗臂车上,利用绝缘工具,例如绝缘杆,绝缘手套进行手动作业。在大多数带电作业时,应保持对地不少于0.4m,对相邻导线不少于0.6m的安全距离,使用绝缘杆作业法更是加大了作业难度。近年来尽管针对配网带电作业操作制订了一系列规范性技术准则和作业规范,但由于任务量大、危险系数高、环境恶劣,人员伤亡事故还是时有发生。
关键词:配电网;机器人;安全操作
1 配网带电作业机器人简介
为此,早在20世纪80、90年代,全球就开始了配网带电作业机器人的研发。典型的遥操作机器人包括日本九州电力公司开发的PhaseⅠ和PhaseⅡ系列机器人,1990年西班牙马德里理工大学开发的ROBTET液压驱动机器人,以及山东鲁能智能公司开发的液压遥操作机器人。但研制的大多数遥操作机器人只涉及普通的力反馈遥操作,不涉及其他的遥操作辅助方法,操作者进行作业前需要大量的练习,在接触物体之前缺乏距离感,不确定机械臂路径是否合适,遥操作的体验感不佳。
虚拟夹具是辅助操作人员进行遥操作,并且能够优化运动轨迹,提高作业效率的一种方式。其原理就是在虚拟仿真环境中加入主动约束力并反馈到操作者端来引导操作人员控制主端机械臂。就像使用直尺绘制的直线会比徒手绘制的直线质量更高,虚拟夹具能够引导操作者绘制各种高质量的三维空间曲线/直线(引导型虚拟夹具),从而控制从机械臂末端按三维曲线/直线运动。另一方面,主动约束力也能将机械臂的运动约束在某些特定的区域内(禁止型虚拟夹具)。这帮助操作者降低了任务的复杂度和遥操作的工作量,同时也减轻了操作人员的心理负担。目前,虚拟夹具技术已经被运用到了各个领域,如医疗手术领域、水下探索领域等。
然而在大部分关于虚拟夹具的研究中,虚拟夹具都是预先定义的,很少有实时建立、和人有交互的。只有与现实中的环境相结合,实时构建相应的虚拟夹具,这样的研究才有应用意义。研究了一种基于手术刀与环境相互作用力测量实时生成虚拟夹具方法,来辅助完成微创机器人手术任务;将RGB相机和Kinect红外深度信息相机结合,设计了一个人和二维图像交互接口,使操作者能够手动在二维图像上绘制虚拟夹具并在对应的三维空间内生成三维虚拟夹具;研究了基于患者鼻组织的CT图像序列建立点云模型,在此基础上构建适合鼻腔的禁止虚拟夹具。禁止虚拟夹具的边界与鼻组织的边界重合,从而在保护鼻组织的同时最大限度地保留手术空间。
本文通过虚拟夹具辅助力反馈遥操作,帮助操作者更高效地完成任务。在机械臂末端附加六维力传感器反馈的力能让操作者在操作时更了解从机械臂和环境接触时的接触状况;另一方面,通过RGB-D相机扫描三维工作场景,获取环境的三维地图。通过人的主动设置,空间中能够生成相应的虚拟夹具,产生对应的约束力辅助引导主端操作人员完成配网带电作业。力传感器的测量力和虚拟夹具的空间约束力共同构成的合力作为力反馈。
2 遥操作系统
2.1 遥操作控制路线
我们搭建的遥操作系统分为两部分,第一部分是地面的主操作端(客户端),第二部分是空中的从机械臂端(服务端),两端各配备1台电脑,电脑间通过TCP/IP网络协议进行通讯,使用的是Wi-Fi网络。主操作端电脑和力反馈设备Geomagic Touch、头戴式显示器(VRHMD)相连,集成了IMGUI控制界面,能通过按键式控制向服务端发送任务指令。虚拟仿真环境和服务端都集成在空中作业系统的下位机上,从机械臂由服务端直接进行控制,并上传状态信息至服务端。客户端控制机械臂时有两种操作方式:一种是通过Ⅰ所示途径,将运动指令通过路由器传至仿真环境中的机械臂,服务端读取仿真环境中机械臂的运动传递给真实世界中的从机械臂;另一种是沿Ⅱ路径,通过路由器直接将运动指令发送至服务端控制机械臂,仿真环境中的机械臂只作为现实机械臂的状态映射,用于需要示教模式的运动。移动端是作为客户端便捷性的一个扩展,可通过LTE网络远程控制从机械臂端,但需要更为简单的控制方式,同时也伴随着更大的延迟。
2.2 力反馈遥操作
力传感器是安装在机械臂的末端的,随着机械臂位姿不断变化,力传感器坐标系相对于世界坐标系的旋转也在不断变化,因此必须实时把机械臂末端传感器的力转换为世界坐标系下的力,遥操作人员才能正确判别机械臂末端的受力情况。通过Ⅱ通讯路线,我们能获得机械臂的各个关节角度θ。我们作为试验的从机械臂是UR5机械臂,其改进后的D-H参数如表1所示:
表1 从机械臂改进后的D-H参数
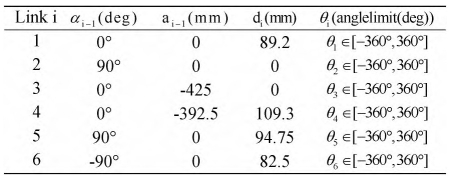
本研究对施加在机械臂末端的受力情况进行分析,考虑其三维力的大小和方向,因此在坐标系转换时只需考虑旋转变换。利用上述求得的机械臂末端腕关节坐标系到基座坐标系的旋转矩阵R,将力传感器测得的三维力f左乘旋转变换矩阵R即可得到以基座坐标系为基准下的笛卡尔坐标系下的三维力fb。

再左乘世界坐标系下到基座坐标系下的旋转矩阵,即可得到以世界坐标系为基准的笛卡尔坐标系下的三维力fw。
![]()
工具装备完成时,以此时力传感器的数值为基准置零。此时在机械臂平稳遥操作移动时,主操作端将感受不到反馈力,只有在机械臂末端执行器与环境进行接触时,主端才会反馈接触力。
3 导线识别定位
为了生成正确位置的虚拟夹具,必须对电力线的位置进行定位。本文采用双目视觉的方法进行目标的识别定位。首先需要对相机的内参进行标定,得到校正后的双目无畸变图片对。接着通过图片特征点提取和匹配并计算得到视差图,利用三角测距法得到和图片相同大小的深度图。之后需要完成相机的外参标定,即相机坐标系相对于世界坐标系的相对关系。由于我们使用的ZED双目相机,内参在出厂时已完成标定,因此我们这需要进行外参的标定即可。
通过双目相机,可以得到同一帧的RGB图像,深度图和点云图数据。ZED点云图的数据和四通道图片的数据格式一致,均为三维矩阵的格式。每个像素点位置包含了1×4的一维矩阵,储存了表示X、Y、Z和RGBA颜色信息的数据。本文首先对RGB图像进行导线的分割,进而映射到三维空间得到导线所在的空间位置。由于电力线的颜色为黑色,因此可以采用的常规的分割有基于颜色的阈值分割,基于颜色的区域生长的分割,基于神经网络的分割方法等。前两种方法较为简单,但受背景以及图片整体颜色影响较大,神经网络分割的方法需要大量的训练数据来达到较好的训练效果。考虑到需要适应阴天等光照不足的条件下的环境,我们选择了神经网络中典型的基于Mark R-CNN网络的分割方法。
4 虚拟夹具
在配电网的带电工作中,如果机械臂不慎触碰到电线,将会造成严重的安全事故。因此,必须建立一个禁止型虚拟夹具,以限制一定的工作空间,并防止操作人员在操作失误时意外碰触高压电线。同时,操作员需要使用引导虚拟夹具来完成任务。实现禁区虚拟固定装置的方法可以大致分为两种。一种方法是通过软件创建几何并在几何表面上产生约束力;另一种方法是通过功能建立力反馈。
结束语
面向配网带电作业遥操作机器人,我们拓展了需要遥操作任务中的遥操作虚拟夹具力觉引导系统。具体优点表现在以下两个方面:
1)在遥操作中加入力反馈,使操作者对机械臂与环境的接触状况更加了解,增强了遥操作系统的透明度;
2)能够实时根据扫描的三维地图来实时生成自定义虚拟夹具,具有更好的人机交互性;同时将虚拟夹具用于辅助遥操作,使任务更为简单,效率更高。
参考文献
[1]Y Maruyama.Robotic applications for hot-line maintenance[J].Industrial Robot:An International Journal, 2000,27(5):357-365
[2] R Aracil, M Ferre, M Hernando,et al.Telerobotic system for live-power line maintenance:ROBTET[J].Control Engineering Practice,2002,10(11):271-1281
[3] 李健,鲁守银,李运厂,等.10kV配电线路带电抢修作业机器人实用化研究[J].制造业自动化,2012,34(2):90-94

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号