优能拓智能家居(深圳)有限公司
摘要:为探究人身体健康和饮水状况之间的关系,提出基于机智云物联网和阿里云数据库技术的饮水状况智能检测系统设计。系统由智能杯垫硬件、手机APP程序和云端分析程序3个部分组成。本文以优能拓智能家居(深圳)有限公司的智能饮水系统为例进行研究,优能拓水系统支持手机APP操作,用户可在手机或其它智能设备上进行水温调节、定时设置、在线购买获取技术支持等多种操作,能够满足人们高品质的生活需求。
关键词:智能饮水系统;物联网;云数据库
水是人的生命之源,人身体的70%是水,人体血液中水份含量是83%,人体的生命代谢活动都离不开水[1]。随着人生理机能渴觉退化,身体已经缺水也不会觉得口渴。本文基于物联网建立人饮水监测系统采集及分析人饮水状态,根据居住环境温湿度、人体基本生理参数、慢性病情况等提出个性化健康饮水建议,进而帮助人们调节身体健康。目前已有一些系统采用物联网技术采集人们的生活、行为数据用于健康分析。如杨君仪等人设计了一套能够监测老年人心率、血压的可穿戴式监测系统,该系统由可穿戴设备、监测终端、云端、用户终端等4个部分组成。李威等联合开发了远程人体监测仪,采用高精度三维位置的MXTOS2-200模块和MXT8051MCU模块设计终端产品,通过对人体心电、呼吸频率、行走状况(跌倒)等生理状态参数的实时采集测量,与正常生理参数范围做比较,进行预警动作。苹果公司研发的iWatch可以进行对使用者心率偏低和偏高时的预警通知,进行摔倒预测,多达五项的运动指标检测。
1系统总体设计
本文采用了4个直流电机驱动的机械模块,倒水模块采用机械臂送水。控制系统包括UPSquared处理器、电机驱动模块、STM32F103x(MCU)模块、Zigbee无线模块、UWB定位模块、机械臂模块、供电与稳压系统。机械系统包括运输以及倒水系统,通过机械系统和控制系统的密切配合保证运动的稳定性和功能的可靠性。按照如下步骤进行操作:
1)当用户需要机器人进行服务时,只需按下按键开关,通过Zigbee模块的无线传输将命令发送至机器人的行动总控中心UPSquared开发板,开发板发出行进指令,使得机器人启动并前进,通过MCU最小模块实现对机器人的辅助控制。
2)机器人依靠UWB定位模块实时监测定位信息,并识别出目标地点,计算出到达目标所需转动的角度以及行进的距离。通过L298N模块驱动电机运转实现对机器人前进、倒退、位置调整等运行状态的控制。并通过MPU6050模块感知前进角度,对前进方向不断进行调整。
3)机器人到达目标地便停止行进,利用磁耦合谐振线圈的电压随空间距离的变化特性,实现对目标地水杯的精准定位,使得出水口准确对准水杯并开始放水动作。通过超声波测距仪实时监测水杯水量,保证水杯中的水不会溢出。
4)结束任务后,机器人能够返回原地待命。
5)当有两个或两个以上目标同时发出信号时,机器人应按接收到信号时间的先后分别响应,完成倒水任务。系统方案如图1所示。

图1系统工作框图
2系统设计
2.1UWB模块送水系统要实现在接到送水请求后在较短的时间内将水送达的功能,就必须快速而准确地到达水杯的位置。常见的许多定位方式都不能达到要求。
室内环境相对复杂,红外测距定位、深度摄像机定位等方式等定位方式准确度不高;而且必须要求水杯在机器人的视距范围内,而事实上由于室内人员活动、桌面摆件遮挡等因素存在,这一条件常常得不到满足。
1)室内定位对精度要求较高,GPS、WIFI、蓝牙等定位方式精度多在米级,不能满足高精度定位的要求。
2)Zigbee等定位方式信号传输受多径效应和移动的影响很大,精度对硬件和环境的依赖程度很大。
3)超声波定位等方式响应较慢,会增加系统工作延迟。UWB定位采用极窄脉冲传输数据,数据传输速度快、定位精度可达厘米级、且抗干扰能力强,并且具有低功耗、安全性高等优点,可以较好的满足系统工作的要求,因此我们在系统中采用UWB模块进行定位。
DWMl000芯片是一个超宽带无线收发芯片,对于多路径衰弱有更强的抗干扰能力,在高衰弱环境下也可以进行可靠的通信,非常容易的集成到实时定位系统(RTLS)和无线传感网络(WSN)中。

图2DWM1000模块框图
本文使用双面双向测距算法的通讯方式只需要5次通讯,就能测量标签分别到三个基站的距离。
2.2目标方向角度的感知原理送水系统进行移动的动作如前进、左转弯走弧线、后退等,总体可以分解为两个正交的部分,即直行和转向。实际上解决的就是机器人到达目标位置需要旋转的角度和方向的问题。
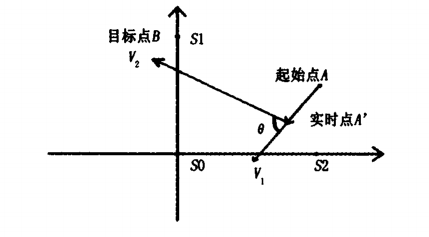
图3角度测算图
图3中,A点为起始点的位置,S0、S1、S2:三点对应三个定位基站。通过UWB模块进行测距与定位,可知起始点到三基站的距离,当标签接收到来自目标基站S0的信号,主控制器控制机器人按初始方向行进一小段距离,得到实时A’的位置信息。V1为机器人前进方向的向量,U为实时位置到目标点方向的向量,将U平移至A’点进行分析,则在此时机器人需要转向目标点的角度为V1与V2的夹角
θ。在V1与V2已知的情况下由公式1可计算出机器人需要转动的角度:

得出机器人需要转动的角度。
2.3方向调整算法
通过目标方向角度感知的计算,得到机器人需要调整的方向,下--步采用MPU6050模块检测机器人旋转的角度。机器人旋转速度与电源输出的能量有关,在电源能量下降时的情况与电量充沛时不同,只是采用简单的控制策略容易出现旋转时间长或系统震荡等问题,因而我们采用PID控制,以提高旋转过程的抗干扰能力。
PID控制根据偏差的比例(Proportional)、积分(Inte-gral)、微分(Differential)进行控制,,控制框图如图4所示。
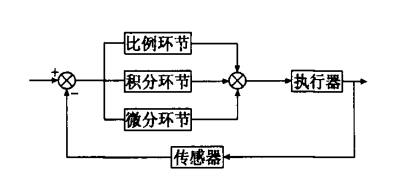
图4PID控制框图
在本系统中,误差的积累作用较小,也不需要提前预测差值的到来而提前响应,故而在重点整定比例系数通过测试不同比例参数下的系统响应情况,选择出合适的参数。
2.4出水口精准定位
送水系统在准确到达水杯附近后,需要精确控制出水阀口至杯口正.上方。出于系统稳定性考虑,本文采用磁耦合谐振式无线电传输装置进行精准定位。磁耦合谐振式无线电传输装置的主要组成部分包括:
1)磁耦合谐振部分:由谐振线圈、谐振电容串联构成谐振体,发送与接收线圈分别产生和接受磁场能量,是电路与磁场的耦合媒介。发射线圈采用1.3mm的漆包线,圆筒式绕法N=3匝,直径为10cm,接收线圈与发射线圈尺寸、绕法完全一致,以保证收发端线圈的固有频率一致。
2)磁场驱动源:包括供电和高频激磁电路,此部分功能是将直流电源的直流电转换为线圈中的高频电流,用以驱动磁耦合谐振部分产生谐振磁场并向其提供高频能量,实现无线电能传输。
3结论
本文所设计的系统采用Zigbee模块进行呼叫器与机器人之间的数据交互;采用UWB模块在室内进行精准定位;采用MPU6050模块进行旋转角度感知,PID算法控制机器人旋转;基于电流磁效应和电磁感应定律感知水杯位置;采用超声波模块对出水口上升的高度和水杯中水位进行检测[2]。不但实现产品的功能控制要求,同时实现产品童锁、防干烧、防泄漏监测等安全方面的控制温度及配件的在线监控,实现产品安全可靠智能化。
参考文献
[1]黄道燚,陈敏敏.基于物联网技术的智能饮水机设计研究[J].赤峰学院学报(自然科学版),2020,36(4):20-22.DOI:10.3969/j.issn.1673-260X.2020.04.006.
[2]刘露露,骆雯,李哲林,等.基于物联网技术的老年人饮水状况监测系统设计[J].机电工程技术,2019,48(5):66-67,168.DOI:10.3969/j.issn.1009-9492.2019.05.019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



