绍兴文理学院机械与电气工程学院,浙江绍兴, 312000
摘要:本文研究的主要内容是单片机采集TCS230颜色传感器的数据进行数据对比,分拣颜色,从而输出指令给电机驱动板,单片机再采集灰度条的状态,判断小车坐标,进行路线规划,控制小车寻迹至各颜色对应的区域。本论文的主要特点是,采用输出数字量的8路灰度条传感器进行小车的寻迹与坐标定位;使用4线spi通讯的OLED屏设计人机交互;使用4自由度的机械臂作为机器人搬运或夹取物品的工具。
关键词:环境监测;分拣、TCS230颜色识别、机械臂、单片机;
1 引言
今年来,随着中国快递行业的快速发展,行业规模迅速扩大,在2020年,中国的快递年总业务量已超过了800亿。面对物流行业业务量的快速增长,对快递的分拣效率要求也在不断的提高。目前许多的物流公司也都采用了许多不同的分拣机器。在科技的发展中,机器人能够有效的提高劳动生产率、产品质量、生产效率与降低生产成本等方面都有着重要的作用和意义。随着现代计算机网络技术的发展和信息社会技术时代的进步,智能工业机器人的物流技术研究和其应用逐渐成为社会广泛关注的热点,并且在经济社会的各个领域中广泛使用[1][1]。智能分拣机器的出现,在物流行业中的中转中心环节能够大大的减少人力负担,并且提升分拣效率,降低分拣的容错率。
2 系统总体设计方案
图1 系统总体设计方案/系统结构图
2.1 系统硬件结构
1.硬件系统搭建
本系统的硬件平台如下图所示:
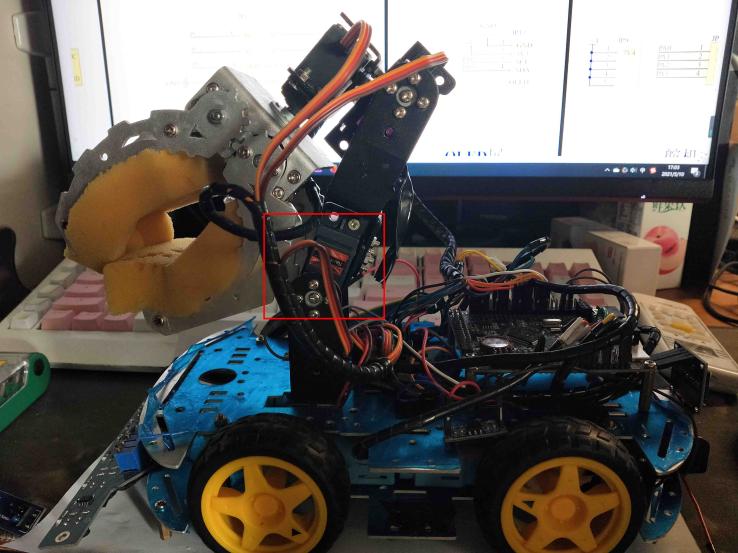
图2 硬件平台图
系统整体设计以STM32作为核心,包括各种传感器模块,电源模块,电机模块,机械臂,设计一个分拣智能机器人。
机器人的行动方式采用了智能小车作为运输承载作用的方案,使用灰度条循迹传感器进行路线的识别及规划,输出PWM给L298N驱动板来控制电机,使用比较基础的颜色传感器TCS230进行颜色识别,对比数据,针对物品的颜色进行分类,其中分拣的颜色为RGB(红绿蓝)三种颜色。当颜色传感器检测到物品颜色后,系统能够根据检测到的物品颜色控制机器人将物品进行特定区域的分拣,完成机器人智能分拣任务。
2.2 系统软件设计
本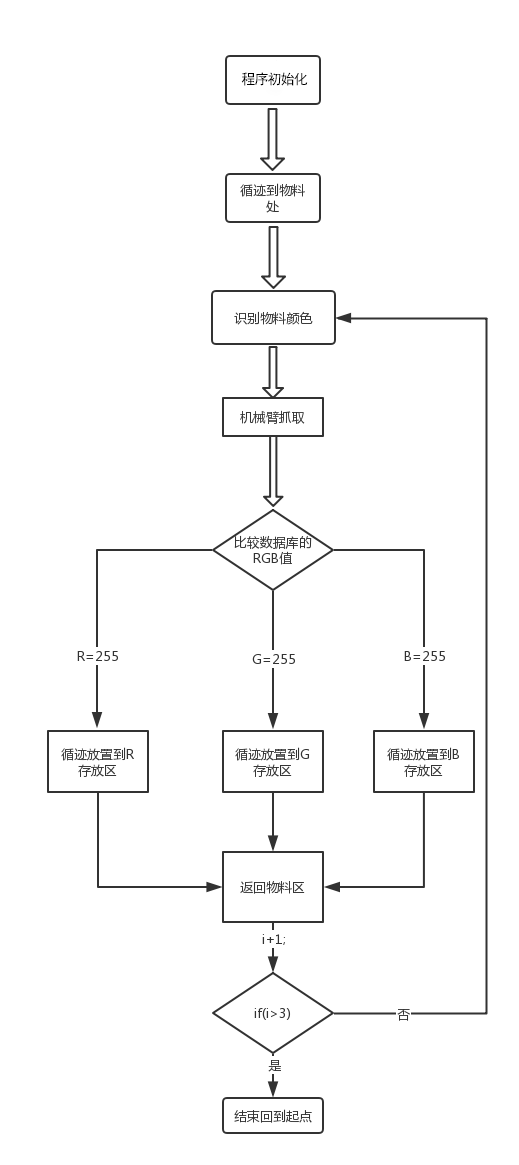
系统的软件设计结构图如下:
图3 总体程序流程图
3结论
本设计是以STM32F407单片机作为主控芯片设计的智能分拣机器人,包括硬件、软件、人机交互界面的设计。是单片机采集TCS230颜色传感器的数据进行数据对比,分拣颜色,从而输出指令给电机驱动板,单片机再采集灰度条的状态,判断小车坐标,进行路线规划,控制小车寻迹至各颜色对应的区域。
4 参考文献
1[] 顾鹏飞,于朋程,张金生,主浩,唐蕾,杨玲玲,杨永杰.基于STM32智能物流分拣机器人设计
作者简介:
王梦寻,2002.12,男,汉,安徽淮北,绍兴文理学院机械与电气工程学院电气自动化系,学生。
通讯作者简介:薛晶晶,1990.3,女,汉,山东菏泽,绍兴文理学院电气自动化系讲师,博士研究生,从事智能控制方向研究。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



