高 强,37030619850731**** 湖北 武汉 430033
邱文涛,23018319880415**** 湖北 武汉 430000
3.高昀,中船集团第七一〇研究所 湖北 宜昌 443003
摘 要:论述了磁耦合谐振式无线供电系统组成,提出了水下无线充电系统的电路建模方法,进行了电磁耦合机构优化设计并建立电路仿真模型,根据海洋环境分析了在水流冲击结构偏移影响下四种典型拓扑补偿电路结构选取原则,可为类似水下无线供电系统设计提供借鉴。
关键词:水下无人航行器;无线电能传输;电磁耦合;优化设计
海洋与湿地是人类赖以生存的资源宝库。人类对海洋的研究与探索永无止境。但在海洋、湿地等环境所进行的科学研究及工程应用中,用电设备的灵活性与安全性一直受到电能供给方式的制约。传统的供电方式通常是采用直接电气接触方式来进行。但海洋或湿地环境介质的特殊导电性却给这种供电方式带来了极大的困难。在此类环境下,无线电能传输技术是解决用电设备电能供给问题的最佳方法。无线电能传输技术利用高频磁场作为媒介完成能量传输,能量发射与接收端可以实现完全电气解耦,从而有效避免了海水及泥浆环境腐蚀性及环境压力的影响,有效地提高了供电过程的灵活、安全、稳定与可靠性。同时,由于消除了直接电气接触,用电设备与供电装置均可以具有更高的灵活性。
本文以某水下无人航行器为例设计一套感应耦合无线电能传输系统。针对无线充电系统中的电磁耦合器,建立并推导了松耦合变压器的T型等效电路模型和互感模型,建立耦合线圈模型,分析了线圈位置偏移和偏转角对互感的影响情况。对耦合变压器的线圈结构进行分析和优化,设计了整流稳压电路、高频逆变电路的拓扑结构等。最终进行了方案模型的仿真,验证了此方案的可行性。
2 水下电能无线传输系统原理与组成
磁场耦合无线电能传输系统的构建原理主要来自三个方面:现代电力电子能量变换技术、电磁感应耦合理论、控制理论。作为一种新型的水下电能传输模式,在供电侧与用电侧没有物理线的连接,是目前移动水下设备电能接入的最佳解决方案。感应耦合式无线电能传输系统包括:原级电能变换模块、原边谐振网络模块、副边谐振网络模块以及次级电能变换模块。
能量发送端由高频逆变装置、整流滤波电路和控制电路组成,发送端产生交流能量通过无接触变压器传输到能量接收器。能量接收端和次级变压器连接相连,由控制电路构成和输出整流滤波环节,提供负载所需能量,还可以根据需求灵活的移动。当系统正常开展工作,在经过整流和滤波之后,输出端将交流电传给逆变装置,交流电经过逆变装置转换后变成高频交流电,然后供给无接触变压器初级绕组,通过变压器的感应耦合,形成高频电流从次级端口输出,装置接收到的能量能够按照负载实际需求,进行自我调节,直到满足负载的需求为止。系统能量传递借助的方式,主要是电磁感应耦合。
3.1 水下耦合电路模型
耦合电路直接影响了电磁感应式水下无线充电系统的能量传输效率,本文从松耦合变压器的T型等效电路模型和互感模型建立基于耦合电感理论模型。初级绕组中的电流为I1,初、次级绕组间的互感为M。jωMI1为初级电流I1在次级绕组中感应产生的电压;-jωMI2为次级绕组中电流I2在初级绕组中的感应电压值。初级绕组的电阻和电感分别为R1和L1;次级绕组的电阻和电感分别为R2和L2;负载电阻为RL,次级绕组电压为U2。
电磁感应式水下耦合电路两端的电压平衡方程为:
![]() (2)
(2)
互感M是表征电磁感应式电能传输系统初次级绕组之间耦合性能的参数。耦合系数k只与初次级绕组的几何形状、周围的磁性材料以及它们的相对位置有关,它反映了初次级绕组之间的耦合能力,其中耦合系数计算公式为:
记次级端部分在初级端部分的影响阻抗为Zr,其实部记为Rr,虚部记为Xr,即:
![]() (4)
(4)
![]() (5)
(5)
根据以上公式推导可知,水下耦合电路的传输效率为:
 (6)
(6)
因此在磁芯之间间隙一定以及初级端线圈中传输电流一定时,提高L2,从而能增大水下耦合电路的传输效率。在保证其他因素不变时,增大耦合系数k,从而可增大水下耦合电路的传输效率Error: Reference source not found。
3.2 水下耦合机构设计
本文所述水下无人航行器充电距离保持不变,在充电对位时存在一定角度偏差。根据水下无人航行器物理结构,设计发射端为弧形线圈覆盖整个副边接收端的偏移范围,接收线圈为平面线圈,其中磁芯采用铁氧体导磁材料对能量收、发线圈的磁场进行了约束,以减小对周围环境的电磁干扰。如图1所示,建立有限元模型计算线圈自感。
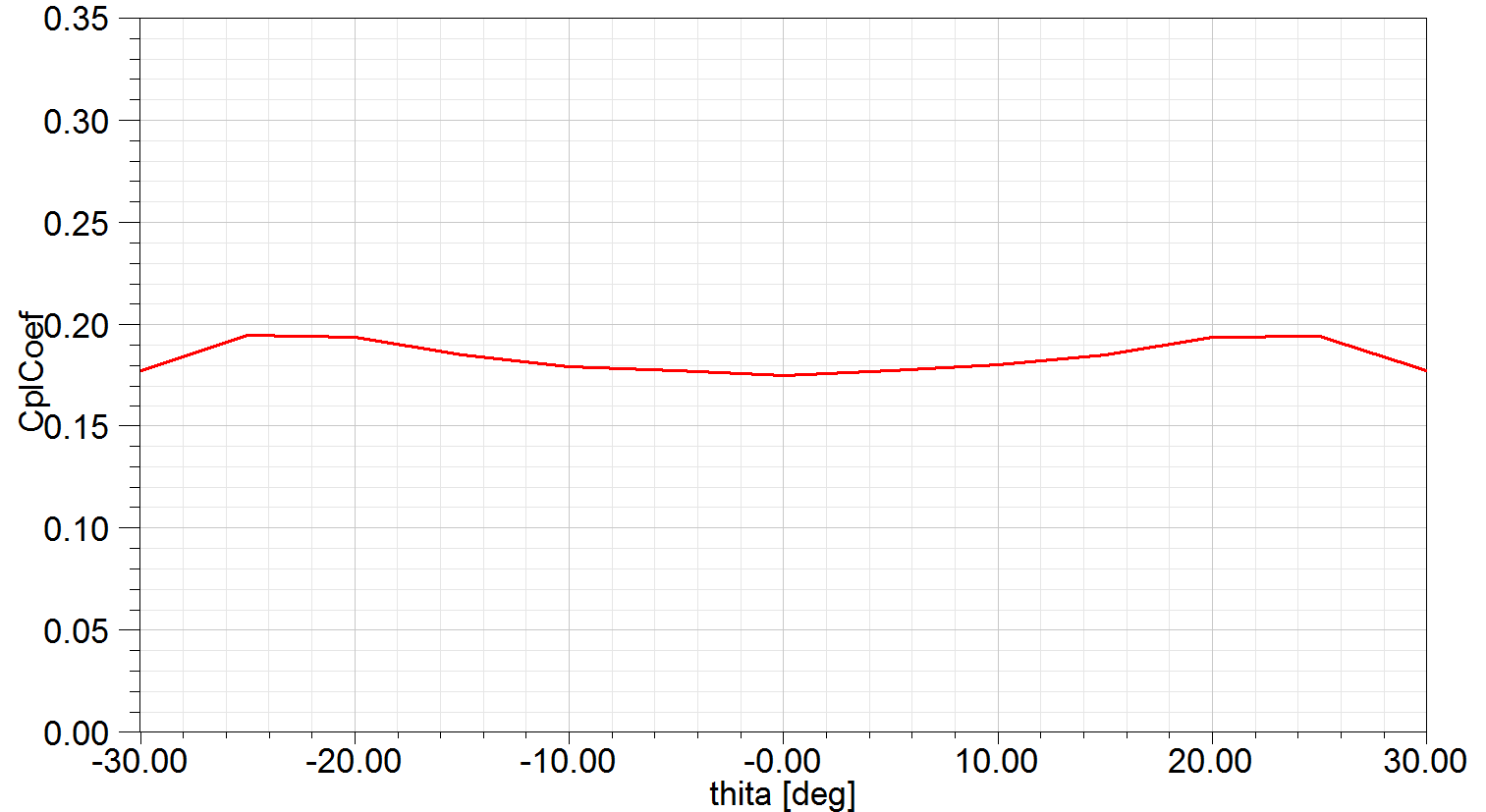
其耦合系数随安装角度偏移变化如图2所示。在安装角度偏移范围内,其耦合系数仅在0.16左右,由式(6)可知,在要求偏移范围内难以保证其输出效率。
4.1 补偿电容
在感应耦合无线电能传输系统中,为了提高功率密度,降低系统对耦合机构体积、质量的要求,系统通常运行在较高工作频率。由于耦合机构两侧的耦合系数普遍较低,随着运行频率的提高,系统电抗呈几十倍的增加,要实现一定功率输出,必须提高充电电压,从而增加了系统的总负荷,大大降低了系统利用率。为了提高系统的传输能力,必须在电路添加补偿电容,改善系统的功率因数,提高系统充电质量。
双侧补偿亦采用全谐振方式,通过在初级侧和次级侧添加补偿电容,使系统在特定高频工作时,初次级回路本身和初级等效电路都发生谐振,使系统功率因数达到最大。双侧补偿电路一般有四种方式如图3所示。
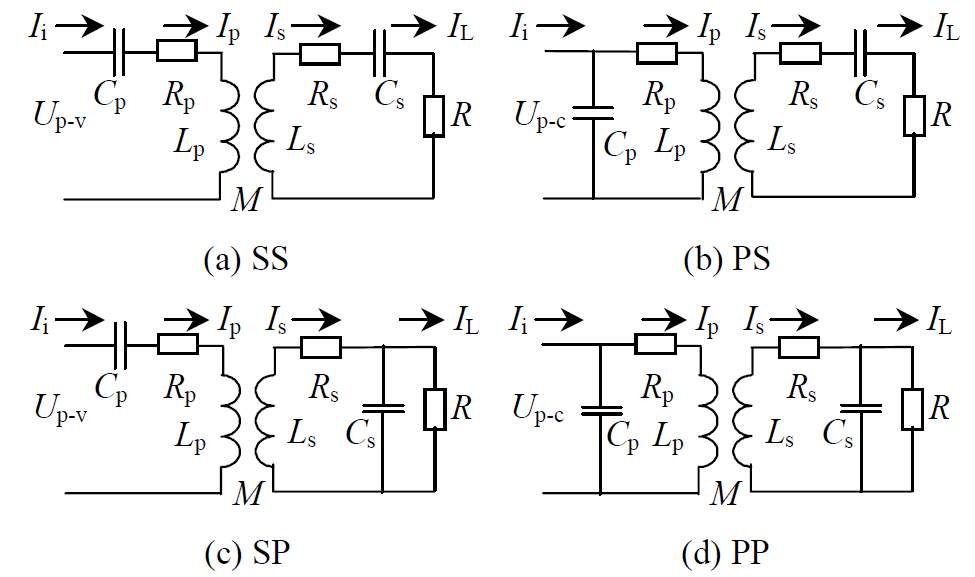
图3 四种基本的谐振拓扑结构
次级回路谐振情况下次级补偿电容值为:
![]() (7)
(7)
研究可知,考虑到水下无线电能传输系统受水流冲击结构偏移影响,其耦合系数k发生变化,双侧补偿PS、PP结构时,系统的输出功率较小,充电效率低。采用SP、SS结构可以使系统获得较大的输出功率和较高的功率因数。输出功率稳定性方面,SS结构稳定性较差,SP结构稳定性较好,利于向水下无人航行器连续稳定地充电。
4.2 系统建模及计算结果
基于4.1节的分析,在耦合结构设计时已经保证了在结构偏移情况下耦合系数的波动较小,本文采用SP结构补偿电路以使系统获得较大和较稳定的输出功率,保证充电过程的稳定性和连续性。建立如下理论仿真模型:输入直流电压375V,要求输出功率最大3kW。采用电压型逆变电路,以3.2节计算的耦合机构参数为基础,计算在无偏移满载时其输出情况。
从计算结果可以看出,逆变电流幅值为14.8A,图4、图5看出逆变电压与电流频率一致,初级线圈达到谐振状态。图6、图7显示负载输出直流电压为216.5V,直流电流为13.5A,输出功率为2922 W,理论模型效率达97%。
图4逆变电压 图5 初级线圈电流

图6负载电压 图7 负载电流
5 结论
针对应用于某水下航行器的无线电能传输系统,本文论述了磁耦合谐振式无线供电系统组成、建立了水下耦合器电路模型,分析了在水流冲击结构偏移影响下四种典型拓扑补偿电路结构选取原则。针对水下无线充电系统中的电磁耦合机构,建立并推导了松耦合变压器的T型等效电路模型和互感模型,建立耦合线圈模型,分析了线圈位置偏移和偏转角对互感与耦合系数的影响情况。对耦合变压器的线圈结构进行分析和优化,并设计了整流稳压电路、高频逆变电路的拓扑结构等,最终进行了方案模型的仿真,验证了此方案的可行性。
参考文献
康乐,胡欲立,张克涵;水下磁谐振式无线电能传输系统的分析与设计[J].西安交通大学学报.2015. Vol.49. No.10:41-44.
王司令,宋保维,段桂林,杜喜召;水下航行器非接触式电能传输技术研究[J].电机与控制学报.2014. Vol.18. No.9:36-39.
张克涵,唐凡,严卫生,宋保维;水下自主航行器非接触式充电系统补偿电路设计[J].电气自动化.2012. Vol.34. No.6:76-78.
7

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



