中国民航贵州空中交通管理分局,贵州贵阳 550012
摘要:随着4D轨迹预测技术的提高,建立在4D计算基础上的航迹预管制已逐渐成为民航空管自动化系统提供的重要功能之一。本文介绍了4D轨迹的预测方法,并以一个真实航班预管制状态时有时无的案例,对航迹更新机制进行深入剖析,在此基础上构建面向航迹预管制预测的优化方法。
关键词:空管自动化;航迹预测;预管制
引言
随着民航业的迅猛发展,空中航空器的数量呈几何倍数增长,给管制员带来巨大的安全压力。空管自动化系统开发的航迹预测功能,通过提前预判进入管制员扇区的航空器,在即将进入管制扇区VSP参数前给予预管制颜色标识和预管制权限,能够极大缓解管制压力,有效保障航空器正常飞行。
4D轨迹预测概述
4D轨迹预测主要是根据飞行计划、飞机性能参数、匹配的雷达航迹对空中航空器的飞行态势进行估算,预测航空器经过航路点的过点时间、过点速度和过点高度[1]。
2.1航路分析
自动化系统在飞行计划创建之初就开始分析航班的预计航路,从而获得完整的航路点列表。当飞行计划中与航路解析相关的飞行计划数据发生变化时,如接收FPL、CPL等电报修改航路,管制员人工修改航路,作为备份系统接收主用系统的飞行计划数据,将重新触发航路分析和剖面计算,并更新航班经过的管制扇区、告警和安全提示。
2.2飞行剖面计算
自动化系统通过计算航班到达每个航路点的的时间、高度和速度信息,从而形成具有连续高度和时间的4D轨迹模型,并计算出飞行计划使用的SID/STAR。
系统剖面高度从起飞机场的标高开始,返回目的地机场的标高结束。利用飞行性能数据库,参考飞机性能和允许飞行高度数据,结合经验数据,计算出航班到各航路点的过点时间和过点高度,最后反推预计到达目的地机场的时间。4D轨迹计算模型如图1所示。
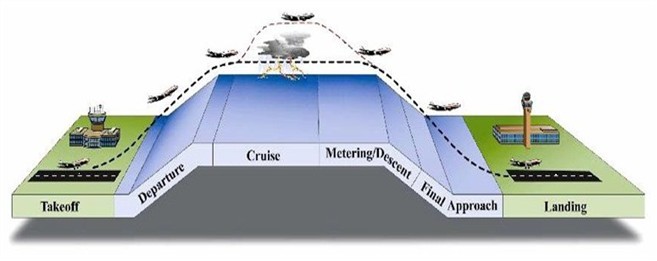
图1 4D轨迹计算模型
航班预管制异常案例
3.1预管制异常情况说明
某日,进近APP2管制席位反映UTC时间04:54~05:10期间,降落航班CSN3436在莱斯自动化系统上预管制状态时有时无,直到航班被APP2管制席位接管。当时莱斯自动化系统为备用状态,需同步主用系统送出的飞行计划。
3.2日志分析
APP2管制席位接管的扇区为APP04,扇区编号为No.7。
笔者以04:53:58~04:56:44期间预管制状态在APP2席位首次出现后消失为切入点进行分析。
1)预管制AFDP进程日志《AFDP-MSG.log》:
04:53:58,发送CSN3436的预管制信息,包括7号扇,在APP2席位看到蓝色预管制状态:
04:53:58 SendPreCTL :. 发送 sectId:7 SAPP [2021/09/10 04:50:04-2021/09/10 04:57:35].
04:56:44,发送CSN3436的预管制,不包括7号扇,在APP2席位无预管制状态:
04:56:44 SendPreCTL :.plan_id=1198.不在VSP发送时间范围内,扇区7过滤掉.
2)FDP服务器上的《AllLog.log》日志:
04:54:56,CSN3436计划和航迹相关:
045456 120:--->RdpCorrelateMsg acid=CSN3436
04:54:56,收到CSN3436位置报告,航路点时间按照雷达报告位置更新。航路点IDSEG为管制区入界点,过点时间为05时03分03秒:
045456--->ProcessRdpPositionMsg startacid=CSN3436
045456--->DebugPlanPoint pointno:19 FIX:IDSEG SECTOR:9 TIME:050303
04:56:44,收到主用系统送出的IFPL报,CSN3436根据IFPL更新,IDSEG的入界时间变为04时47分39秒:
045644--->DebugPlanPoint pointno:19 FIX:IDSEG SECTOR:9 TIME:044739
04:59:49,收到 CSN3436位置报告,航路点时间按照雷达报告位置更新,航路又变回之前的航路点时间:
045752--->ProcessRdpPositionMsg start acid=CSN3436
045752--->DebugPlanPoint pointno:19 FIX:IDSEG SECTOR:9 TIME:050301
之后雷达与IFPL交替对CSN3436航班进行更新,当CSN3436按照雷达报告位置更新时,APP2席位出现预管制状态,当CSN3436收到主用系统同步的IFPL报时,预管制状态消失。
3.3异常原因总结
莱斯自动化系统在备用状态下,收到IFPL报会重新做CSN3436航路过点时间计算,AFDP计算预管制扇区时判定不在APP04(7扇)的预管制计算周期内,故将APP04(7扇)取消预管制。收到CSN3436的雷达位置后,AFDP计算预管制扇区时判定在APP04(7扇)的预管制计算周期内,故将APP04席位(7扇)显示预管制状态。所以出现“CSN3436预管制状态时有时无”现象。
3.4解决思路
当系统处于主用状态时,不会同步IFPL报文,此时系统根据雷达位置报告或者管制员人工修改航路计算的预管制一般都是符合预期的。当系统处于备用状态时,由于IFPL报文可同步飞行计划,尤其雷达位置报告与IFPL报文交替更新4D剖面计算,当二者计算的预计过点时间相差较大就会出现案例中“时有时无”的情况,针对这一问题,笔者提出将IFPL报文内容拆解后同步,即同步IFPL中的航路信息,航路点的过点时间由雷达位置报告计算,可有效避免上述问题的产生。
结束语
预管制计算是空管自动化系统提供的重要功能之一,能帮助管制员提前预判需要接管的航空器,减少管制员不必要的精力消耗。本文对某现场发生的预管制异常案例进行分析,总结4D轨迹预测与预管制的关系,在此基础上提出的改进方法,可有效避免因4D剖面过点时间跳变而导致预管制状态突变的异常情况。
参考文献
[1] 南京莱斯信息技术股份有限公司. NUMEN-2000 空管自动化系统技术手册[M]. 南京:南京莱斯信息技术股份有限公司, 2013.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



