1西南交通大学 信息科学与技术学院 成都市 611756
摘 要:变电站采用巡检的方式来确保变电站的安全性,采用机器人巡检是今后变电站无人值守化的发展趋势,巡检机器人精确的定位问题是研究巡检机器人的基础。
本文针对巡检机器人在变电站环境下的定位问题,通过扩展卡尔曼滤波算法对多传感器进行数据融合,克服单一传感器造成的累积误差从而实现精确定位,最后在模拟变电站环境下完成实时定位实验。
实验结果表明,通过扩展的卡尔曼滤波算法融合多传感器数据,可以提高变电站环境中的实时定位精度。
0 引言
随着我国电力行业的不断发展,电网规模越来越大,它在社会方方面面起到了关键的作用。变电站作为电网中的组成部分,确保它安全可靠运行,是保证整个电力系统可靠运行的重要一环。
近年来,随着计算机技术的越发成熟,使得智能机器人行业得到了飞速发展。变电站巡检机器人是机器人领域的一个重要应用分支,要完成整个变电站的巡检任务需要多种智能技术的融合,其中就包括小车定位技术。然而现有的巡检定位方式存在以下问题:变电站多搭建在野外,导致GPS信号误差大延迟高;变电站内部存在的电磁场对一些传感器存在较大干扰。因此在实际的变电站场景,由于种种条件的限制,变电站智能巡检机器人定位精度低无法实现稳定全面的自主巡检[1]。
综上所述,当前变电站巡检机器人自主定位存在诸多问题,解决巡检机器人高精度自主定位问题是很有必要的。
1卡尔曼滤波算法
单一的传感器在移动平台定位中会产生累计误差,利用多传感器数据融合可以克服这一点。R. E. Kalman 和 R. S. Bucy等人为解决数据融合问题,提出了卡尔曼滤波算法[2,3],对系统状态进行最优估计的算法。
1.1 扩展卡尔曼滤波
标准的卡尔曼滤波适用于线性系统模型,而实际场景中许多系统都是非线性的,在非线性系统中无法通过标准卡尔曼滤波算法估计系统状态。为解决此问题,R.S.Bucy等人以标准卡尔曼滤波算法为基础,对非线性系统线性化处理,之后对系统状态进行最优估计,该算法被称为扩展卡尔曼滤波算法[4-5]。
存在非线性离散状态空间方程:
 (1-1)
(1-1)
其中, 函数为非线性系统下的状态转移函数,
函数为非线性系统下的状态转移函数, 函数为非线性系统测量函数,
函数为非线性系统测量函数, 分别为系统状态变量、系统输入变量、系统观测变量。对非线性函数用泰勒公式展开,得到线性化近似模型,之后通过线性卡尔曼滤波对系统状态变量进行最优值估计。
分别为系统状态变量、系统输入变量、系统观测变量。对非线性函数用泰勒公式展开,得到线性化近似模型,之后通过线性卡尔曼滤波对系统状态变量进行最优值估计。
假定 函数和 函数在采样点处可微,对 函数和 函数分别进行泰勒展开:
 (1-2)
(1-2)
系统的状态方程与观测方程线性化之后如下:
 (1-3)
(1-3)
 为
为 估计值,
估计值, ,
, 。
。
与卡尔曼滤波算法类似,扩展卡尔曼滤波算法包含以下五个过程。
(1)状态变量 与误差协方差矩阵 初始化
初始化
 (1-4)
(1-4)
(2)状态预测
 (1-5)
(1-5)
(3)计算误差协方差矩阵
 (1-6)
(1-6)
(4)计算卡尔曼增益矩阵
 (1-7)
(1-7)
(4)状态更新
 (1-8)
(1-8)
(5)误差协方差更新
 (1-9)
(1-9)
1.2 激光雷达与双目视觉里程计融合
为解决单一传感器存在累积定位误差的问题,本文利用扩展卡尔曼滤波算法,融合双目视觉里程计与激光雷达里程计,减小定位误差累计、完成变电站巡检机器人实时定位。
在一个数据采集与处理周期内,双目视觉里程计激光雷达里程计同时工作,完成数据采集、特征点提取、特征点匹配、运动估计,并输出里程计的位姿估计值。利用数据融合算法融合双目视觉里程计与激光雷达输出的位姿估计值,将融合后的位姿估计值作为系统最终输出的位姿估计值。
2 巡检机器人定位实验及精度分析
实验主要关注小车定位精度问题,实验基于ROS操作系统,于Webots中搭建本文的变电站虚拟环境,在变电站虚拟环境中分别对单一激光雷达里程计、扩展卡尔曼滤波算法进行误差分析,评估不同算法的定位精度。为定性分析单一激光雷达里程计以及不同的融合定位算法的定位误差,本文在X轴方向和Y轴方向分别绘制了巡检机器人在变电站虚拟环境数据采集平台下不同时刻的误差值曲线。从图2-1和图2-2可以看出,单一的激光雷达定位误差不论是在X轴方向还是Y轴方向都存在累计误差,随着时间积累,误差越来越大,误差值只能扩散无法收敛。而通过融合双目视觉里程计,X轴与Y轴方向的误差都出现收敛。
单一的激光雷达传感器存在累计误差,随着小车巡检过程的进行,X轴和Y轴方向上的累计误差逐渐增大,单一的激光雷达传感器得到的位置与小车实际位置偏差越来越大。通过多传感器数据融合算法将双目视觉里程计与激光雷达里程计进行融合,实验结果表明,融合算法能够一定程度上消除了累计误差,使定位精度更加准确。
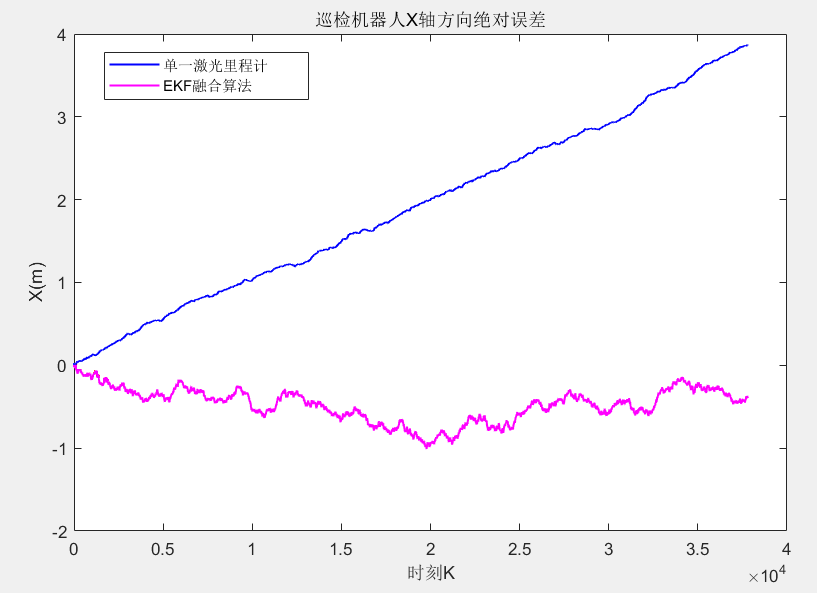
图2-1 X轴方向误差

图2-2 Y轴方向误差
对比两者的定位误差,定量的分析该融合算法的融合效果,单一激光里程计在X轴的平均绝对误差为1.80m,Y轴的平均绝对误差为1.83m;而在采用了扩展卡尔曼滤波算法的情况下X轴的平均绝对误差为0.25m,Y轴的平均绝对误差为0.39m。利用多传感器数据融合可以显著减小单一传感器造成的累计误差,提升定位精度。
3 结论
论文针对变电站环境中机器人巡检的定位问题,通过扩展卡尔曼滤波算法结合多传感器数据提高巡检机器人定位精度。通过巡检机器人定位实验,相较于单一传感器,利用扩展卡尔曼滤波算法实现多传感器数据融合技术能在变电站环境中实现更精确的定位,能够基本满足巡检要求。
参考文献:
鲁守银,张营,李建.移动机器人在高压变电站中的应用[J]. 高电压技术, 2017, 43(1): 276-284.
Haykin S. Kalman filtering and neural networks [M]. John Wiley & Sons, Inc, 2001.
Huan huan Sun; Jun Bi; Sai Shao. The State of Charge Estimation of Lithium Battery in Electric Vehicle Based on Extended Kalman Filter [J]. Advanced Materials Research, 2021, 953: 796-799.
[4] R. Zlot and M. Bosse.Efficient large-scale 3D mobile mapping and surface reconstruction of an underground mine. in The 7th International Conference on Field and Service Robots, Matsushima, Japan, July 2021.
[5] Haykin S. Kalman filtering and neural networks [M]. John Wiley & Sons, Inc, 2001.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



