兖矿国宏化工有限责任公司 电仪车间
摘要 本文基于MATLAB的Simulink工具箱对单容水箱的液位串级控制系统经行了仿真,通过使用建模法和一些试验,验证了串级控制提高系统性能和稳定性的作用。
关键字 MATLAB 串级控制系统 PID 仿真
MATLAB是美国Math Works公司出品的商业数学软件,用于数据分析、无线通讯、深度学习、图像处理与计算机数学、信号处理、量化金融与风险管理、机器人,控制系统等领域。在MATLAB工具包中有一个Simulink模块,可以对控制系统进行仿真,为工业控制系统的设计和精确控制提供参考。本文基于化工系统中常见的单容水箱系统进行分析,通过对经典的PID闭环回路系统进行仿真,验证了串级系统对提高控制系统性能的作用。
串级系统原理
串级系统由两个调节器串联工作,其中一个调节器输出作为另外一个调节器的给定信号。该系统主要包括两个回路,主回路和副回路。当系统中扰动发生时,破坏了原来的稳定状态,根据位置不同,可分为一次扰动和二次扰动。在串级系统中,由于引入了一个副回路,能及早克服进入副回路的扰动,由副回路进行粗调,主回路进行细调,从而提升控制品质。
串级控制系统采用PID控制算法,其中副回路往往只整定KP和TI两个参数,而主回路整定KP,TI和TD三个参数。在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的装置称为PID控制器。PID控制的本质就是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,结果用来控制输出。在工业控制系统中,理想的连续控制系统PID规律为:
其中,Kp——控制器的比例系数,与比例度P互为倒数
Ti——控制器的积分时间,又称积分系数
Td——控制器的微分时间,又称微分系数
u(t)——控制器的输出信号
e(t)——测量值和给定值之间的偏差
串级系统设计与建模
图1是一种工厂常用的液位和流量串级系统,其主要特征是有两个调节器,一个液位调节器和一个进液流量调节器,两个调节器之间是串联关系,其中液位调节器的输出是流量调节器的给定。该系统还有一个液位变送器,一个流量变送器及一台调节阀(执行器),其调节对象为容器液位。
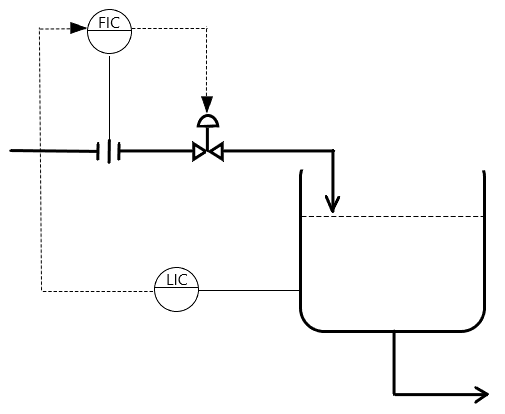
图1 液位与流量串级调节系统
根据串级系统的原理,我们在Simulink中建立仿真(图2)。我们加入四个开关控件,其中开关1和开关2用于将副回路从控制系统中切除,另外两个开关用于控制是否向系统中加入干扰信号。这样便可以快捷的在不同条件下完成试验。
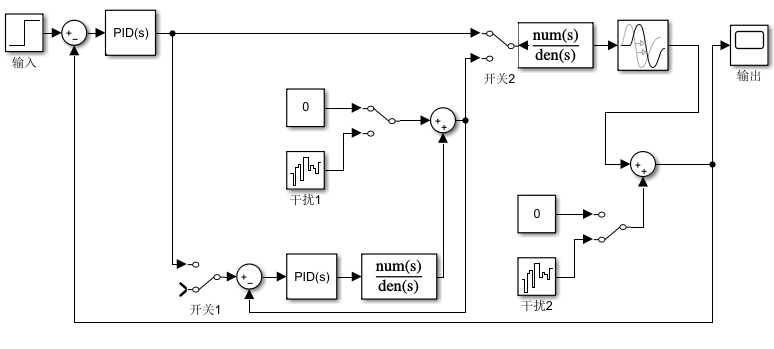
图2 simulink仿真框图
串级系统的仿真
串级调节系统参数整定一般采用两步法,先断开外环,整定副回路,再保持内环PI的值不变,调节外环PID。
先断开外环,整定副回路,按某种衰减比(如4:1)整定副环KP和TI两个参数(整定时副调节器的比例度由大往小逐步变化),然后再保持内环KP和TI的值不变,加入外环,按同样的衰减比调节外环PID。按照“先副后主”与“先比例次积分后微分”的次序,将计算出的主调节器和副调节器参数设定好。在调节过程中,可对调节器参数做必要修改。最终所得曲线应达到图3效果。
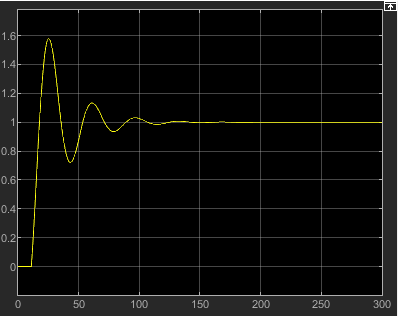
图3 外环整定
在时间为0时候,增加跃迁信号1,设置主调节器KP=6,TI=3,PD=0.4,仿真时间设为300s,切换开关1和开关2,去掉副回路,仿真得到的曲线如图4所示,与图3对比可知,加入副回路的调节系统比不加副回路的调节系统,稳定性得到了极大的改善,调节性能更强。

图4 去掉副回路仿真曲线
在不带副回路和带副回路两种情况下分别加入干扰,将输入信号改为11,控制器各参数保持不变,由图5对比可见,引入副回路的控制系统曲线较为平滑,而未引入副回路的系统曲线出现了极大的波动,说明在控制系统中引入副回路可以有效对抗扰动,及时消除偏差并保持输出信号的稳定。在抗干扰方面有着质的提升。
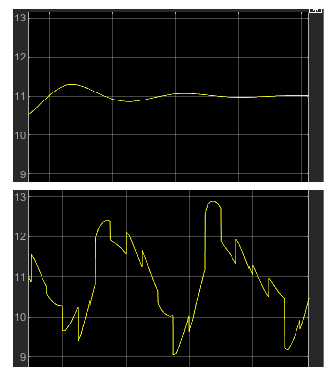
图5 是否加入副回路对抗干扰的对比曲线
结论
本文通过使用MATLAB对串级控制系统进行了仿真设计,证明了串级控制系统可以有效提升系统调节速度,减少响应时间,增加系统的稳定性,由于副回路的存在,对进入副回路的干扰有超前控制的作用,因而减少了干扰对主变量的影响,并且对系统负荷改变有一定的自适应能力。而MATLAB在系统仿真方面,性能优异,对提高工程人员效率,有着非常重要的意义。
参考文献
胡寿松 《自动控制原理》[M] 第六版 北京:科学出版社 2013(03)
刘浩 韩晶 《MATLAB R2018a 完全自学一本通》[M] 北京:电子工业出版社 2019(01)
刘金琨 《先进PID控制MATLAB仿真》[M] 第三版 北京:电子工业出版社 2011(03)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



