杭州市交通规划设计研究院
【摘要】为促进城市轨道的融合发展,围绕绿色环保、高效便捷、资源共享,中运量有轨电车可以起到地铁网补充的作用,随着无人驾驶时代的到来,除了目前炙手可热的汽车无人驾驶,轨道交通由于其特殊德运营、控制方式,在无人驾驶领域更具有实际操作性,本文就运用机器人系统对有轨电车无人驾驶可行性进行模拟研究,实现无人驾驶可降低运营成本,打破发车间隔瓶颈,实现交通低碳化,契合城市绿色、环保的发展要求。
【关键词】校区规划; 有轨电车;无人驾驶;绿色交通
在地铁系统里CBTC(Communication-based Train Control),一种基于通信技术的列车控制技术已经得到了广泛的运用,通过此技术大大缩短了列车的发车间隔,如北京地铁的部分线路基本实现了10s的发车间隔瓶颈。世界上的城市轨道交通无人驾驶的例子也不剩枚举,如德国纽伦堡的地铁三号线早在2008年实现了无人驾驶。无人驾驶的难题可以分成两大类,一类是列车的运行控制,另一类是列车控制技术,也就是我们在铁路上经常提到的CTCS。第一类难题在无人驾驶上体现的重点在于ATO,也就是列车运行的控制,例如如何保证列车按照由车载计算机处理完的外界数据发出的指令来自主运行车辆。这个难点将通过ROS (Robot Operating System) 的模拟来验证完成,由于机器人软件基本运用于机械臂以及其他自动化领域,所以此设想基本无参考的先例,场景代码以及车辆的驱动由C++和Python完成。第二类难题将基于遗传算法以及车载的激光雷达共同来完成对列车制动和滑行以及加速环节的控制。由于有轨电车基本是以目视距离行驶,不同于地铁依靠信号灯,所以在模拟中简化了车轨的接触关系。通过优化算法,相比于有人驾驶,无人驾驶可实现更低的能耗,从而达到更大的环保效果,同时减少了运营成本,这归结于无驾驶人员以及轨道和车轮低损耗的行驶方式。
2.探索过程
本次研究运用机器人技术有轨电车进行了无人驾驶模拟。为提高激光雷达的扫描效率将把扫描区域分成三个区域:A,B,C。其位置关系如下图所示:
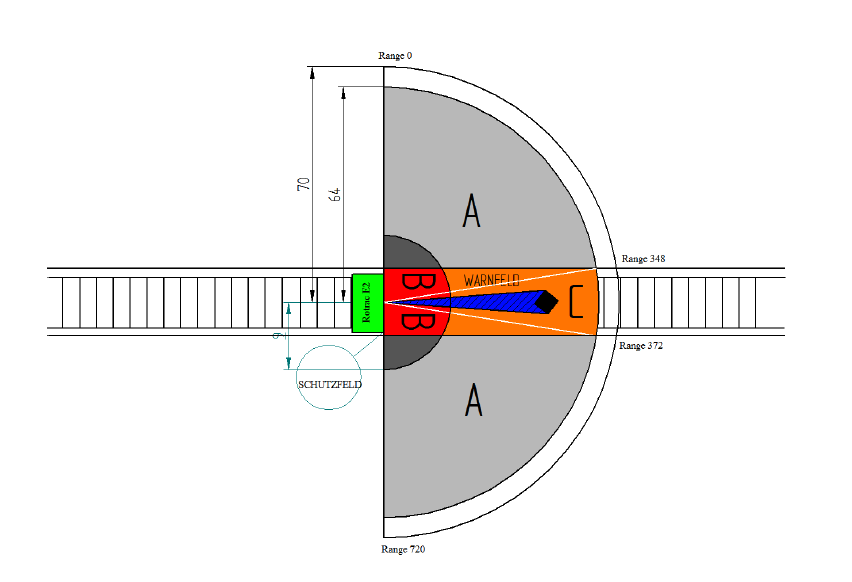
图1激光雷达扫描区域划分
C区域为列车前进方向区域,为重点扫面区域,B区域为列车行驶工程中的警示区域,以保证无障碍物突然闯进列车行驶方向的轨道上,A区域作为更大的保护区域,以保证更大范围的安全。本次模拟中用到的激光雷达的扫描半径为100米,由于有轨电车的低速行驶特点,此扫描半径对于低于50km/h的车辆都能满足安全制动的要求。
以下为列车在C区域检测到路障的情景以及从驾驶拍摄的画面。
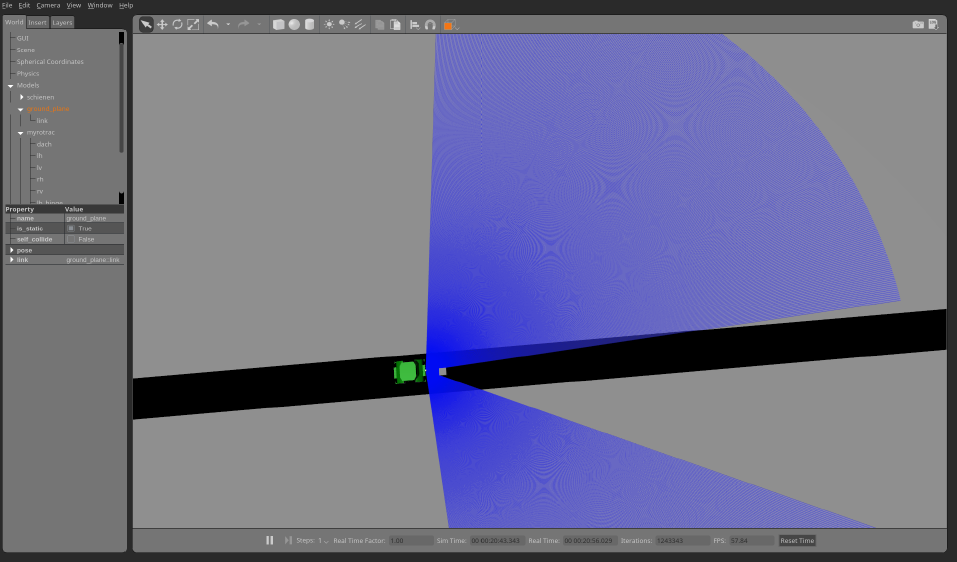
图2 C区域出现障碍物实景
为简化算法,这里制动过程的减速度为定值。根据不同的场景以及运营的要求,其减速可以通过调整算法以及算法参数来实现。这里车速设定为8km/h,在检测到C区域出现障碍物后开始制动,减速分为两个阶段。下图为ROS软件的结果图以及Matlab可视化后的速度时间变化图。
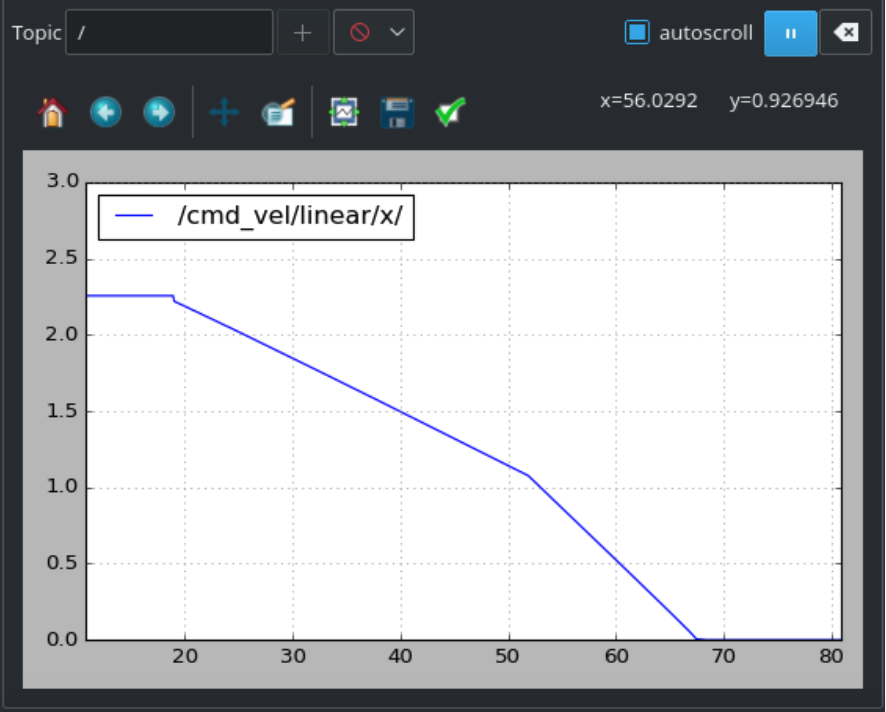
图15 ROS软件速度时间变化
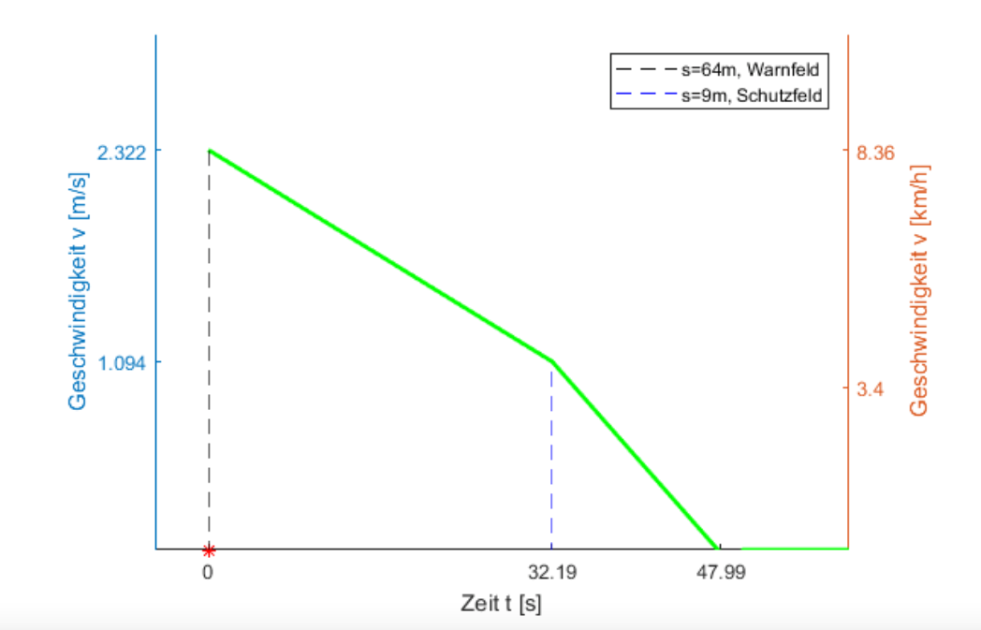
图16 Matlab可视化后的速度时间变化
3.结论
通过模拟验证了无人驾驶的可行性,无人驾驶的实现已经不存在技术上的问题。通信作为CBTC系统的重要一环,在有轨电车的无人驾驶中也起着重要的作用,不论是未来的5G、WiMax还是WiFi技术都有望在有轨电车的无人驾驶中得到运用,安全的通信接口将是之后研究工作中的重点。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



