桂林星辰科技股份有限公司, 广西 桂林 541004
摘 要:在永磁电机控制系统中编码器等位置传感器的使用增加了系统的复杂性,降低了系统的可靠性和适应性,因而无位置传感器控制方法被提出并得到了广泛的研究。现有的永磁同步电机无传感器控制方法主要进行零低速或中高速条件下转速的估计,缺少零低速向中高速平滑切换的方法研究,存在着适用转速范围有限等问题。利用脉振高频电压信号注入法进行零低速时转子的位置估计,利用模型参考自适应法进行中高速时的转速估计,从而实现表贴式永磁同步电机全速度范围的无传感器控制。对于某一表贴式永磁电机,应用Matlab/Simulink进行了永磁电机无传感器控制系统的仿真分析,仿真结果验证了所提出方法的有效性。
引 言:永磁同步电机具有功率密度高、效率高、结构简单、可靠性高、功率因数高等优点,在工业、农业、水利、航空航天等领域具有广泛应用,可用作驱动电机、发电机、励磁机等。随着几年来稀土永磁材料的不断发展,永磁材料的剩磁、磁能积等性能不断提升,高性能稀土永磁材料提升永磁电机性能。对于部分应用场合的永磁同步电机,例如矿井,油田等精度要求很低的场合,可以使用无传感的方案,提高设备运行的安全性,同时降低了成本。
1 基于高频注入法低速段的SPMSM无感控制方案
如下图一所示:
图一
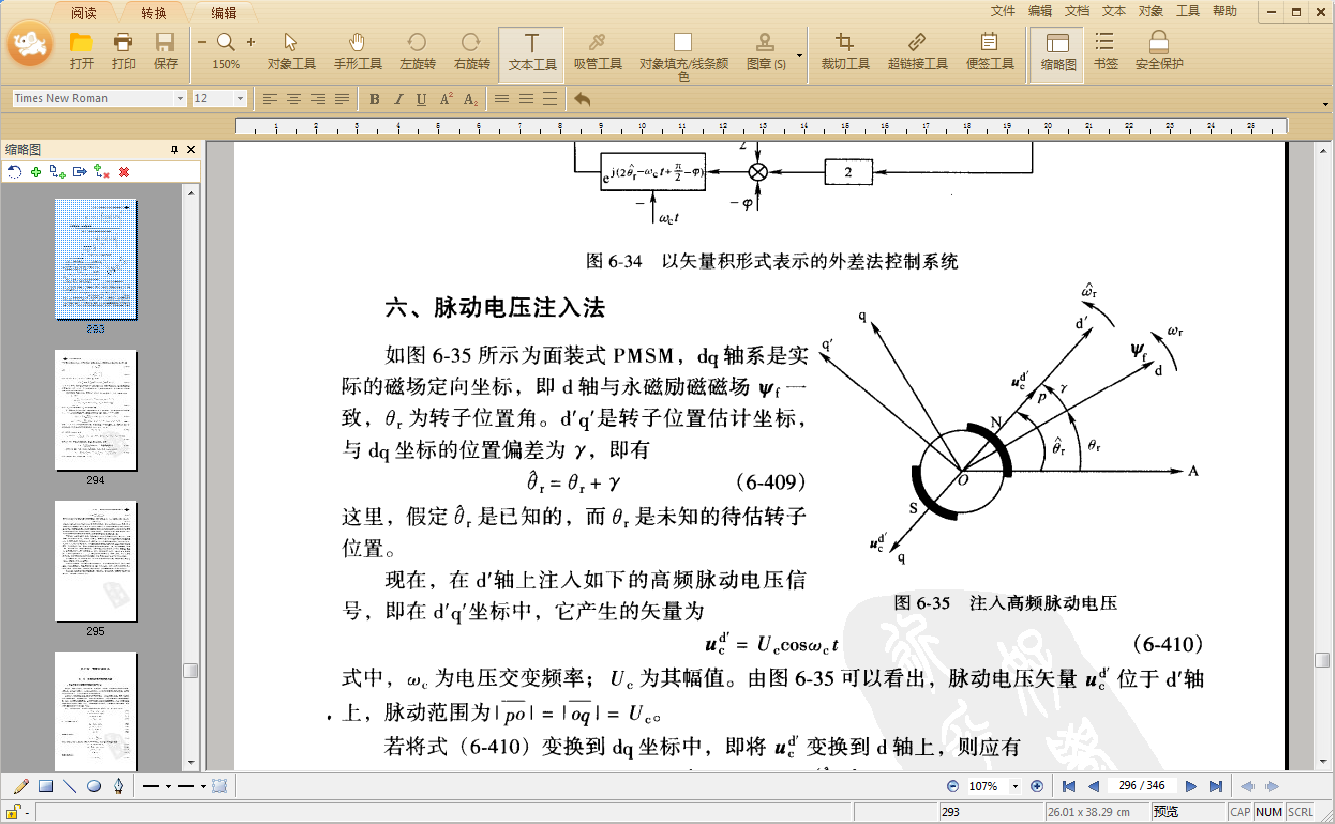
图中d、q轴系是电机的实际磁场定向坐标系,即d轴与永磁体Wf一致, 为转子位置角。
为转子位置角。 和
和 是转子位置估计坐标。与dq坐标的位置偏差为γ。
是转子位置估计坐标。与dq坐标的位置偏差为γ。

这里,假定 r是已知的,而 是未知的待估转子位置。现在在 轴上注入如下的高频脉动电压信号,即在 和 轴系的坐标中,它产生的矢量为:
r是已知的,而 是未知的待估转子位置。现在在 轴上注入如下的高频脉动电压信号,即在 和 轴系的坐标中,它产生的矢量为:

式中wc为电压交变频率,uc为电压幅值,脉动电压在 轴上,若将上式变换到dq坐标轴系,则应有:

如果r= 则表明脉动电压矢量uc直接作用在d轴上,在这种情况下, 产生的交变磁场沿着d轴与励磁磁场Wf叠加在一起。随之,这会改变励磁磁路的饱和程度,使励磁磁路具有凸极性,它会对 产生调制作用。显然,当 偏离励磁磁极轴线时,这种调制作用会随之发生变化,这种变化也会反映在高频电流响应中,因此这个电流响应中便会载有转子位置估计误差的信息。为了获得这个高频电流响应,可利用坐标电压矢量方程:
产生的交变磁场沿着d轴与励磁磁场Wf叠加在一起。随之,这会改变励磁磁路的饱和程度,使励磁磁路具有凸极性,它会对 产生调制作用。显然,当 偏离励磁磁极轴线时,这种调制作用会随之发生变化,这种变化也会反映在高频电流响应中,因此这个电流响应中便会载有转子位置估计误差的信息。为了获得这个高频电流响应,可利用坐标电压矢量方程:

式中

由(3),(4)和(5)式推得:

式(6)表明载波电流的幅值与脉动电压大小和频率的高低有关,还直接与位置估计误差有关,当使(6)式中的虚部趋近零,交轴电流逐渐变小,由交轴电流产生的谐波转矩的扰动作用逐渐消失。
将 转换到三相静止ABC坐标:
转换到三相静止ABC坐标:




为了能够提取位置误差信息,需要对载波电流进行解调,将式(7)乘以
最终得到


显然,式(9)所表达的电流分量是高频分量,可以通过LPF将其滤除,进一步将式(8)改写为:

取式(10)中的实部得:

在 很小时,有:
很小时,有:

(2)转子磁极方向判识。分别向估计出的转子位置角r和r+π注入幅值相等宽度相同的两个电压矢量,通过比较d*轴响应电流的大小,判断转子N极方向。如图二所示,向估计出的转子位置角r和r+π注入幅值相等宽度相同的两个电压矢量U和-U,电压矢量的电流响应分别id1*和id2*,由于定子磁路饱和凸极效应的影响,当估计的转子位置角r为实际的转子位置角一致时,id1*>id2*,电流响应如图中虚线;当估计的转子位置角r与实际的转子位置角相反时,即实际的转子位置角为r+π时,id1*
图二
2 基于MRAS的中高速无传感控制
在前面的使用高频输入法的过程可以看到,在电机的电枢注入高频信号,这在电机工作在中高转速时,影响驱动器的电压利用率,为此在中高速时必须采用别的方法来实现,以克服这个问题。SPMSM在转子同步旋转dq坐标系上的电流方程如式(13)所示

其中, ,
, 分别为定子电压的dq轴分量,L和R分别是定子电感和定子电阻,
分别为定子电压的dq轴分量,L和R分别是定子电感和定子电阻, 为转子电角度转速,
为转子电角度转速, 为转子磁通。将式(13)改写成矩阵形式如式(14)所示
为转子磁通。将式(13)改写成矩阵形式如式(14)所示

其中: ,
, ,
, ,
,
由式(14)可知,该式以电机转速 为自变量,可以作为MRAS的可调模型。以电动机本体作为参考模型,为系统提供dq轴电流的参考值 ,
, 。将式(14)写成状态空间表达式,即式(15)所示
。将式(14)写成状态空间表达式,即式(15)所示

其中:
 ,
, ,
, ,
,
将式(15)改写成估计值的形式则有:

定义广义误差 将式(16)减去式(15) ,可得
将式(16)减去式(15) ,可得

根据波波夫超稳定性定理,可以得到MRAS的参数自适应率,速度估计算法如式(18)所示

式中,从可调模型里获得, , 从参考模型中获得。对式(18)进行积分,便可以求出转子位置的估计值,即式(19)

3 仿真与实验
实验的硬件平台如图三所示。物理实验平台由电机部分和控制器两部分组成。采用了一台额定功率为2.2kW的三相永磁同步电机作为负载电机,该负载电机由变频器施加转矩控制以提供测试所需要的恒定负载转矩,并令其直接与待测试的SPMSM通过轴套连接并实现对拖。在实验测试过程中,为选用的待测试永磁同步电机同时配备了2500线增量式编码器以提供电机实际转子位置的反馈。

图三
结 论:
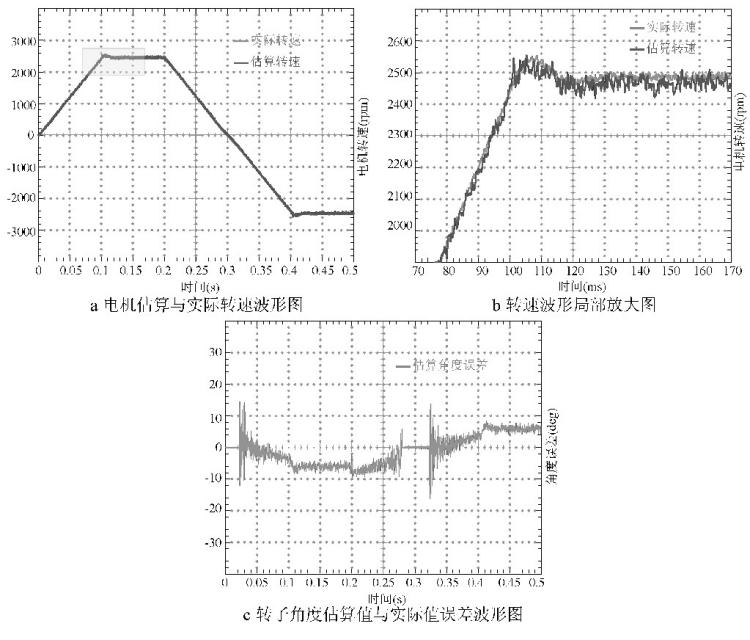
可以看到,估算转速与实际转速的均值相等,估算转子位置与实际转子位置之间有接近±10°的最大误差值。可以达到较高的控制要求。
参考文献:
[1]孔晓光. 王凤翔. 徐云龙. 等.高速永磁电机铁耗的分析和计算[J].电机与控制学报,2010,14(9):26-30.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



