国网淄博供电公司 255000
摘要:机械自动化是当前机械工业发展的大势所趋,它在引入了机械化智能技术后工业生产效率大幅度提升,且也对工业生产者提出了更高的技术要求。就目前看来,采用自动化的气动机械手臂可有效代替传统人工完成各种重复性较高的体力劳动内容,在减轻生产人力生产负担过程中大幅度提高了工业生产工作效率与质量。所以本文中就探讨了机械手臂的基本种类与功能特性,并着重对其中的气动机械手臂进行了研究,具体研究了它的主要结构、气动控制原理以及具体生产工作流程,证明气动机械手臂的关键技术特点与控制方式在实际生产应用中所发挥的重要价值。
关键词:气动机械手臂;控制方式;种类特性;结构;工作流程
气动机械手臂能够代替传统人工完成更多生产工作,其技术功能优势表现明显,在工业生产自动化过程中发挥了重要价值作用,例如在自动生产线、机械加工、智能装备、建筑领域及采矿生产领域中都有采用。一般来说,常见的机械手臂主要通过抓取、移动工件来完成工业生产线上某些简单重复的工作任务,它在确保生产工作稳定性的同时也有效代替了人力工作,能够在某些危险恶劣作业环境中工作,并具有着较高的工业生产效率与安全特性,是目前表现十分出色的智能辅助生产设备。
机械手臂的基本种类与特征
在工业生产中,机械手臂的基本种类丰富,例如普通机械手臂、气动机械手臂或者液压机械手臂都比较常见,结合不同的生产要求与技术要点,不同类型机械手臂所负责的工作区域与相关性能也不尽相同。就以气动机械手臂为例,它是在传统普通机械手臂的设计基础之上优化设计而来的,它其中专门增加了气缸与气泵等诸多重要气动元件,在工业生产性能表现上功能与效率更加突出。气动机械手臂的设备可控性与生产灵活性表现良好,拥有较高的自动程度、反应速度和传动速度,但在力量传递表现上相对偏弱,且维护成本普遍较高[1]。整体看来机械手臂在生产过程中表现出了巨大作用效能,结合具体工程项目还要做好设备选择工作。
气动机械手臂的基本结构与工作原理
气动机械手臂主要采用到了气压回路对手臂部分进行自动化、智能化控制,它在当前的自动生产领域中应用十分广泛。结合工业生产中的诸多不同技术要求,启动机械手臂的基本设备结构与表现形式也多种多样,它其中的关键部件就是控制装置,另外像驱动电源、气缸、气泵以及机械手臂的运动部分与固定结构也配置于设备常规系统中[2]。
一套完整的气动机械手臂在结构功能与控制方法上表现出色,可按照固定动作顺序完成某些气缸运转设计,在生产操作中可完成物体抓取、支臂伸缩与连接臂升降等等操作,且在立柱转动方面也有较为灵活特性。一般来说,可利用PLC控制与调节气动机械手臂操作过程,确保控制手柄随时随地都能成功复位。另外像手动操作功能也能顺利实现,应用范围相当之广[3]。
在气动机械手臂中是包含了关键部件的,实际上它在设计上实现了机械手臂简化,且在立柱功能上建立了移动装置,保证机械手臂能够随时从支臂A点提供支点,然后上下摆动向B点移动,完成气动机械手臂的后续工作。在这一套系统中,立柱是具备足够力学强度的,它在机械手臂工作过程中会设置相应安全保障,且支臂在A点转动过程中会直接与立柱之间形成连接,体现支臂在竖直方向的有效摆动,提高旋转缸连接效率。在整个生产过程中,连接臂本身也与抓手联系并在G点位置建立气缸直连关系,如此就能实现对抓手的精细化移动。考虑到对设备实际工作的基本要求,它还需要确保机械手臂能够随时到达工作面的任意位置,优化气动机械手臂的生产效能,为此,必须对气动机械手臂进行简化,具体简化结果参考图1[4]。
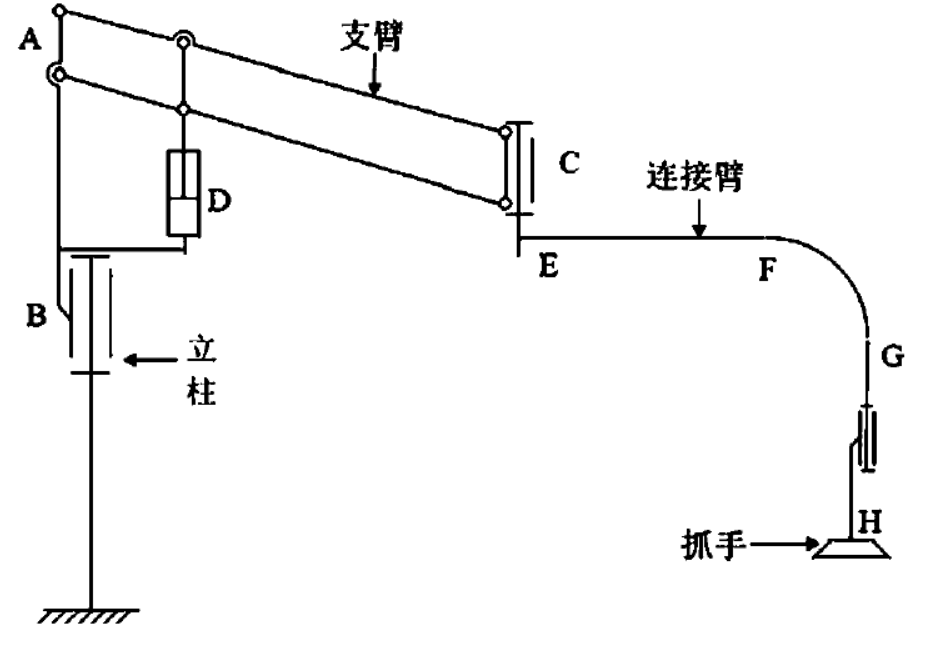
图1气动机械手臂的结构简化示意图
在图1中,气动机械手臂在结构上有所简化,它其中就专门设置了两个法兰连接结构,其中可以看到其下部法兰几何尺寸相对偏大,直接与地面地脚螺栓相互连接且连接牢靠,上部法兰结构则直接与圆锥滚子轴承连接建立支撑结构,确保立柱上半部分可绕立柱中心线随意自由转动,并专门在关节关键位置设置制动结构,一旦发生各种机械故障就能够实现第一时间故障排除,直接将旋转结构锁定。需要注意一点,立柱与支臂的连接位置需要设计专用的安全防护制动装置,它可有效规避支臂失效问题,解决某些突然下垂安全隐患[5]。
气动机械手臂的基本工作流程
气动机械手臂在气压传动过程中需要利用到机械手臂,它主要在工业生产中建立了一套行之有效的空气压缩系统,通过系统中所产生的大量能量直接转化为动能,进而完成气缸等诸多执行元件的生产运动过程。简言之,要电利用转化动能直接带动气动机械手臂中的各个部件完成技术动作内容,这主要得益于手臂内部动力结构十分发达,在结合辅助、控制结构建立手臂应用技术体系的过程中,它也通过执行机构完成气动机械手臂操作过程。举例来说,在系统中动力机构就能够将气泵中的空气压缩并提供压缩力,确保辅助机构对起源进行有效过滤和传导,体现辅助功能应用技术优越性
[6]。再者,利用辅助机构可对气源内容的流动方向与流量进行分析,保证元件执行到位,建立气缸、旋转缸技术操作体系,完成指定生产动作。大体来讲,气动机械手臂中就包含了动力机构,它其中有动力源与气压发生装置;辅助机构中则包含了气源处理装置;而控制机构中则包含了三大控制阀,分别为压力、方向以及流量控制阀,最后配合气动执行元件展开生产工作。在气动装置中,气动机械手臂可自主设计合理的工作流程,确保机械手臂生产技术应用到位,建立立柱气缸回缩下降体系,确保支臂气缸回缩摆动,以便于快速准确抓取各种生产线上的物品,并放置于指定位置。在气动机械手臂制作生产流程中,需要利用到执行单元中的行程开关与压力继电器来实现目标点有效检测,再通过PLC系统来主动发出各种控制信号,对相应电磁转向阀进行科学控制,确保气动机械手臂按照提前设计好的预定路线动作展开生产技术操作,提高设备技术应用水平[7]。
总结:
结合本文论述分析结果可以了解到,目前气动机械手臂在关键技术应用与控制方式方面是发挥了巨大价值作用的,它可基于手臂结构功能执行优化建立优势技术体系,确保在不同工作场合中都能发挥启动机械手臂的相应生产工作能力,提高其生产应用价值。而伴随当前我国国内工业自动化技术的高速发展进步,气动机械手臂也希望在未来克服更多技术短板与难题,在生产研究层面上发挥更大功能作用与生产效能,确保基于多学科技术内容展开生产操作,提高生产质量与效益。
参考文献:
[1] 齐爱霞. 气动机械手臂的关键技术特点及控制方式研究[J]. 农机使用与维修, 2019,275(07):41-42.
[2] 赵璐, 陈冰. 基于PLC的气动机械手控制系统研究分析[J]. 南方农机, 2019, 050(006):105-105.
[3] 邓瑜, 张闯开. 气动机械手控制系统设计分析与研究[J]. 内燃机与配件, 2020(8):232-233.
[4] 孙雨婷. 四轴数控机械手臂设计[J]. 科技经济导刊, 2019, 27(14):100.
[5] 陈振鹏. 农业机械自动控制方法及关键技术研究[J]. 农机使用与维修, 2020(7):9-10.
[6] 张雲枫, 韩建海, 李向攀,等. 气动轻量型机械臂伺服控制系统和碰撞检测方法研究[J]. 液压与气动, 2019(03):80-86.
[7]王佳乐. 基于PLC控制的气动搬运机械手设计研究[J]. 花炮科技与市场, 2020,102(01):231-231.
作者简介:周涛,男,1987.1,汉,山东枣庄,本科,高级。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



