(新大洋造船有限公司,江苏 扬州 225107)
摘要:现如今,伴随着世界人口的急速增长,能源紧缺的问题正在变得越来越尖锐,这样的问题也引起了世界各国的广泛关注。海洋领域的资源非常丰富,而且目前开发的程度并不高,这让越来越多的国家把目光投入到海洋资源开发之中,特别是深海资源开发上面。而由于动力定位技术在深海开发上所起到的关键作用,现在已经成为近年来海洋开发最为热门的研究课题之一。
关键词:船舶动力,定位系统,设计探究
1前言
随着当前船舶与海洋工程的不断开发和快速发展,动力定位系统已然广泛应用于多种船舶和海洋平台上,并在其中发挥了重要的作用。
所谓动力定位系统,即是指船舶在不借助锚泊系统的作用下,通过测量系统不断检测船舶的实际位置与目标位置之间出现的偏差,再根据风、浪、流等海洋环境干扰的影响,计算出使船舶恢复到目标位置所需要的推力和力矩的大小,并对安装在船舶上的各推力器进行推力分配,进而使其产生相应的推力和推力矩来抵抗外界环境的干扰,使船舶保持在海面上某设定的目标位置,以顺利完成海面作业。这样的一种闭环控制系统,即为船舶动力定位系统。
与传统锚泊系统相比,动力定位系统具有定位成本不会随着水深的增加而增加的优点,而且这一系统的机动性强、定位精度高、操纵也比较简单。近年来,随着船舶与海洋工程的不断发展,动力定位系统也被广泛地应用到各类海面作业船舶。例如救助船、钻井平台、采矿船、海洋考察船、海底管道和电缆铺设的工作船等等。它们在进行海面及潜水作业时,都需要用到动力定位系统,也就是按照预定的目的、预定位置对船舶进行精确的定位控制。
2 船舶动力定位系统的总体设计
2.1船舶动力控制系统
控制系统:由自动控制系统和联合操纵杆控制系统(IJ)构成,包括带自动与手动控制功能相互热冗余的 DP-A/DP-B 操作站、带自动定向、手动控制功 能的 IJ 操作站、DP-A 控制单元、DP-B 控制单元、IJ 控制单元、便携式控制面板、不间断电源(UPS)和 报警打印机等等,详见图 1。控制系统对位置参考与传感器系统传输过来的信息进行滤波处理后,连同由功率管理系统(PMS)发送过来的发电机功率、断路器状态等数据进行软件综合计算与最优化决策,将控制船舶姿态所需要的推力指令通过 IO 单元传输给各推进器。
在动力系统正常供电发状态下,位置参考与传感器系统,采集船舶的绝对位置、相对位置、吃水深度、艏向、相对风速风向、运动状态等信息,经信号隔离 处理后传输给动力定位控制系统;控制系统对上述传输过来的各类信息进行滤波处理后,连同由功率管理系统发送过来的发电机功率、断路器状态等数据,进行软件综合计算与最优化决策,输出控制船舶姿态所需要的推力指令;IO 单元将控制系统传输来的的船舶姿态控制推力指令,转换成具体的模拟量控制数据,发 送给船舶运动执行机构——艏侧推、艉侧推、螺旋桨和转向舵,同时将船舶运动执行机构实际的响应状态实时反馈给控制系统。通过上述全过程,实现了船舶按照操作者的指令移动、保持位置或航向的动力定位的目的。控制系统框图见下图1。
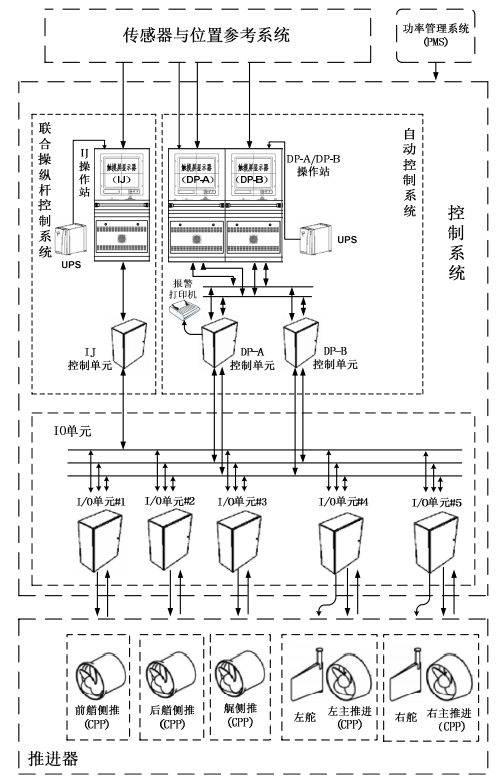
图1 控制系统框图
2.2动力定位能力分析评判标准
动力定位能力分析,一般需要在船舶设计的初期进行考虑,一方面可以评估船舶动力定位系统的能力,另一方面也可以作为其设计的重要依据。目前来看,动力定位能力分析的评判标准有很多,比如 BV 推出的环境位置保持指数 ESKI、DNV 的环境规则指数以及 API推荐的动力定位能力曲线等。在这其中,动力定位能力曲线是评估船舶动力定位系统能力最有效的一种手段,它已经被国内外各大船级社广泛认可。动力定位能力曲线是一条在极坐标下以船舶艏向所指方位为零点,顺时针旋转0°-360°的封闭包络线,它的半径方向表示船舶动力定位系统的定位能力。动力定位能力曲线的表达方式一般可以分为两种,具体阐述如下:
(1)极限风速曲线
极限风速曲线,是在海洋环境中船舶保持位置和舷向平衡所能抵抗的最大环境条件。在实际的工程应用中,一般是以风速来表示环境载荷条件,即在定位能力计算时,风、流、浪的方向一般都看作来自同一方向,通过不断增加海洋环境力和力矩,直到力和力矩能够准确地与推进器提供的最大可用推力平衡。在包络线中,其曲线上任一点的角度表示船舶受到的海洋环境的方向,而半径大小表示船舶所受到的极限海洋环境条件。
(2)推进器利用率曲线
推进器利用率曲线,是在推进器配置以及环境条件确定的情况下,分别计算每一个方向角上风、流、浪的环境载荷,通过推力分配优化,得到纵荡、横荡以及舷摇三个自由度静态平衡下所有推进器推力的最大有效推力比值,从而将每一个方向角上的最大有效推力比值连接绘制成一个0°-360°以内的包络线。在这包络线内,如果推进器利用率超过了100%,那么船舶就不能在此海况中保持位置平衡;如果推进器利用率小于100%,则船舶可以在此海洋环境中实现船舶定位。
3结语
船舶动力定位,是一个非常复杂的控制过程,由于船舶模型本身存在着时变和非线性因素,再加上风、浪、流等环境扰动也是不断变化的。因此,这些内在和外在因素对船舶动力定位控制器的稳定性就提出了很高的要求。目前而言,国外船舶动力定位系统的研究已取得了较大的进展,相对而言,我国在这方面还处于相对滞后的阶段,与国外先进水平存有差距。因此,我国当前使用的主要动力定位系统都是从国外进口的。所以,只有在理论和实际应用两个方面都得到研究和发展,才能提高我国的社会经济发展,防止被其他国家所钳制,推动造船工业和国防事业的迅速发展。
参考文献
[1]刘伟平.浅谈DP3船舶的动力定位系统电缆布置[J].广东造船,2020,39(05):88-90.
[2]贺蓓蕾,徐俊路,于明.DP-3动力定位冗余系统设计与分析[J].中国水运,2016(06):36-37.
[3]王莹. 动力定位系统控位能力的研究与实现[D].东华大学,2015.
(作者简介:陈军,1982年04月出生,江苏仪征人,现任职于新大洋造船有限公司,船舶工程专业,工程师)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



