江苏新亚勘测设计有限公司
摘要:近年来,无人机系统技术在线性工程测量中得到了长足的发展,由于它的总体设计结构极具简单化,有着极低的运用成本,在适应周边环境能力还有测量效率及测量精度等都要远远高于传统测量技术。另外,无人机系统所获取到航拍影像极具完整性、清晰性,可达到一种较高清晰度、大比例尺的成图效果。另外,由于体积较小,对作业人员要求也少,所以在测量过程中可以随时转场,进而有效节省人工成本。本文也会结合实际工程案例,进一步验证无人机系统在线性工程测量中的应用优势,为后期更多技术专家和学者开展此类课题实践研究提供有价值的指导或者参考。
关键词:无人机系统;线性工程;测量应用;研究分析
现如今,我国信息化建设水平已达到世界先列,这种趋势下,也给工程测绘行业的发展带来了新的机遇和挑战,要想更加快速精准的获取到测绘信息数据,并在此基础上绘制出清晰完整的各类地图,关键条件就是要选择现代化的测绘技术,比如无人机这种摄影测量科学技术,它属于新型测绘技术手段的一种,是地面测绘、遥感平台这两种技术手段中间的一项技术,不仅可以有效弥补传统测量技术的应用弊端,以最快的速度获取到准确、清晰的地面影像数据,而且还能为DEM模型的建立以及地形图绘制等提供可靠的参考依据。因此,对该技术进行深入的研究很有必要。
1 工程案例
如某工程实例当中,线性测量项目工程是公路选线类项目国内钢材,为迎合设计图实际需求,公路规划实地勘察设计院委托于当地的国土资源下属规划勘测设计院来承担此项目工程所在测区的1:1000实地测绘范围内低空摄影外业航飞测量、内业处理各项实践工作。航空摄影实测任务整体上,主要采用无人机系统,且摄影范围围绕该市以南部分,分布状态呈条带形状。主路是测区东侧东西方向,主路选线部分是左右分别选取350m范围;在测区范围内,中部南北方向属于辅路,两条辅路均左右各为250m范围。基于该测量工程设计图要求,成图比例尺为1: 1000,测量周期为24天。
2 系统应用实践
2.1外业信息采集
2.1.1外业航摄设备
该测绘工程中采用的航摄仪器主要以CanonEOS-40D数码单反相机为主,其像素1010万,设定有着3.0"宽度视角下LCD液晶的监视装置及实时化显示的拍摄模式,此装置内部CMOS感应装置是APS-C规格、22.2mm×14.8mm尺寸,镜头使用期间焦距转换的系数是1.6。选用9点先进宽曲自动化对焦系统,这9个点均是高精度、十字型的对焦点。此测绘项目工程所用无人机综合系统是IRSA-II型号油动式无人机,如图一所示,此次航飞总共准备无人飞机有四架,第一架和第二架的飞机,均因整体的飞行姿态处于不佳状态,经过了数次的补飞,第三架飞机的姿态已达所设定的各项标准,而第四架的飞机,它主要是获取到供内业所使用精准性影像数据。

图一(IRSA-II型油动无人机)
2.1.2技术要求
结合测量项目工程的设计图相关标准,成图的比例尺寸设定1: 1000、75%-80%的航向重叠、35%-45%的旁向重叠、摄像边界区域南北处覆盖应在像幅30%以上、相片地面是0.1m分辨率,其最大可允许范围是0.12m以内。无人机系统应飞行至相对航高750m后再进行航空拍摄,这样才能确保航摄精度。
2.1.3航线设计原则
由于无人机系统在航拍期间飞行的面积有限,且航高相对较低,所以在飞行过程中不会因地球额自传所影响而出现拍摄误差。另外,由于该测绘工程的测区形状呈长条带状,故航线设定期间,应顺着道路实际走向飞行。航摄具体时间务必合理选定好,尽量依据当地的气候条件来进行确定,一般在每天上午10.00-晚6.00之间,既要保证光照的充足性和风力的适宜性。同时,还要避免地表植被和其他覆盖物不会对摄影和测图产生过大的阴影。此外,在航拍结束后,还要对航拍质量进行全面的检测,不仅要确保航拍影像的清晰度,确保其无任何重叠或漏拍现象。全面细致地检查好航摄区及成图区的覆盖状况,特别要注重航片实际旋偏角及旋偏角,还有航线实际弯曲度,检查它是否能够与特定技术标准相吻合,如果发现并不吻合,务必及时补飞[1]。
2.1.4外业像控点布设方案
在该线性测量工程中,外业部分布设好78个像控点,地标全部是人工铺设,具体布设方案可以从以下几个方面入手:首先,整个测区的测量方式主要为GPS系统辅助空中的三角测量,结合航摄期间机载的定位定向专项系统相应实时定位、事后极高精度的单点定位等特点,以大区域的网布点实施方案为基础,将平面高程合理设定好。在此期间,平高点应布置在区域网各航带两侧,并在各航带中间加设平高控制点,以便可以进一步提高成图精度;其次,像控点应尽量布置在距离旁向重叠中线3cm以外范围内。若旁向重叠面积过大时,则可按照分别布点原则来进行布控;第三,整个测区范围控制点的编号切勿重复。需要尽可能的以四位数字前的冠英文字母,将高点、过渡点合理编写出来,如平高点可用前冠的P来表示、高程点用前冠G表示、过渡点则用前冠N表示。尽可能低沿着整个测区范围周边、测区内,以区域法有效布设好像控点,并铺设80cm X 80cm黑色塑料布作为地标;最后,在测定像控点平面坐标时,应尽量采用GPS-RTK方式进行测定,并明确平面测量误差,最大不要超过0.12m;而相对邻近基础控制点的高程误差则不应超过0.1 m。
2.1.5外业质量检查
观看测区内航空摄影的图像可知晓,无人机实施影像的获取过程均与无人机各项作业的安全技术特定指标相吻合,影像不仅十分的清晰,反差和色差色调适中,而且部分区域曝光度也是处在合理范围之内。另外,影像地面分辨率为0.lm,,完全满足内业航拍需求。与此同时,航向重叠度和旁向重叠度完全满足大比例1:1000成图要求,平均为73%和40%,可作为内业作业开展的最佳参考依据。此外,通过对像控点测量的检验结果可以得知,像控测量精度符合1:1000大比例成图测量精度要求。但由于在前期裁切地标时底布预留不足,所以像控点的大小与相应的设计要求之间存在一定的偏差,但却完全可以满足内业使用[2]。
2.2内业数据信息处理
2.2.1内业测量设备及软件
该测量工程中所采用的内业数据新型处理的计算机是Intel ( R ) Core ( TM ) i7-3 770 ,内部配置情况:DDR3 16G/1600内存、高速5126*4的硬盘、Microsoft Windows 7 X64的操作系统、数字化摄影的测量网格是DPGrid空三的加密系统软件、Ortho Mosaic数据信息编辑系统软件、苍弯数据信息处理系统。
2.2.2内业处理流程
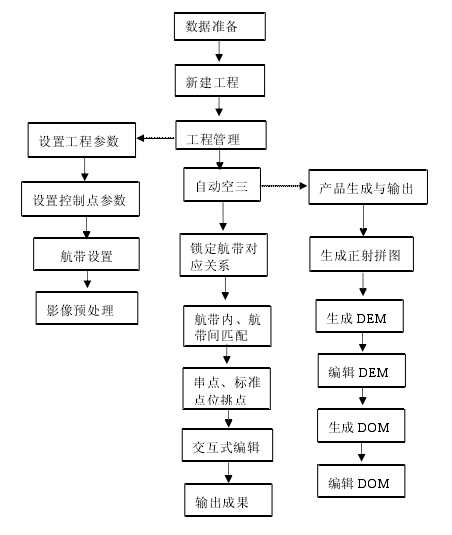
内业操作流程,见图二,空三加密系统软件选定数字化摄影测量DPGrid网格,方便借助此系统软件实施自动化空三系统软件的解算。借助Ortho Mosaic来实施正射的影像图制作、整饰,配合Adobe PhotoShop CSS系统软件合理调整色调;对于图像分幅,借助苍弯、ARCGIS 10.0系统予以编辑好。在图像分幅过程中,需确保平面的坐标系统有着良好独立性,以高斯一克的吕格完成投影,依照着3予以分带。对于高程系统,选定当地独立的高程基准,基本的等高距基于平地的1.0m,把数字话摄影测量处理方式当成是基本的一种成图处理方法。
图二(内业作业流程)
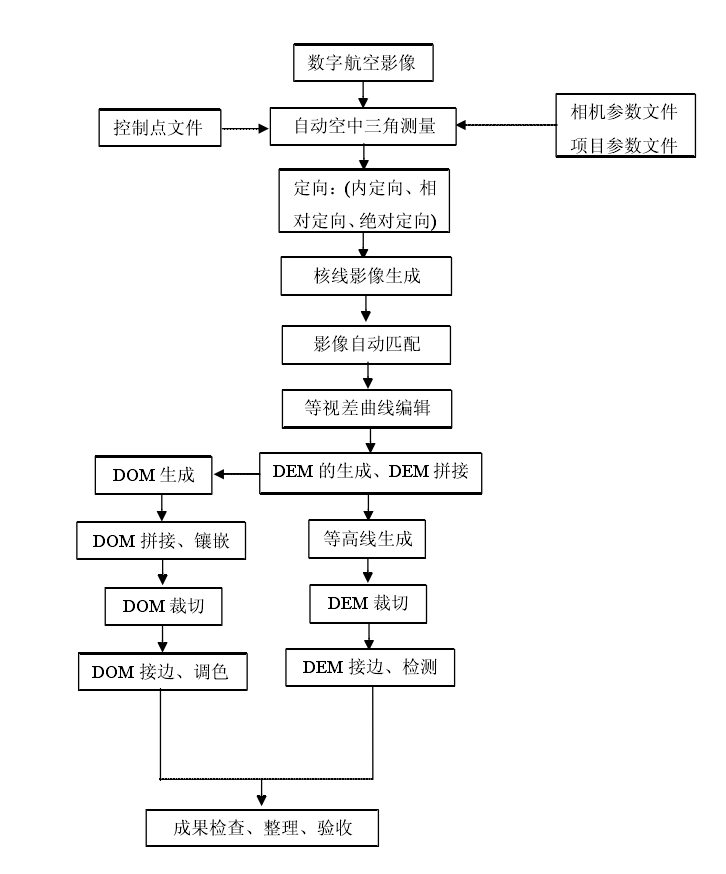
DEM正射的影像图制作具体流程,见图三,实操期间先引入其地形的测图模型,将水平核线的影像及其非水平的核线影像逐步引入,还要将具有高程意义的地形图中的点、线等要素作为模型中的特征点、线要素;第三,要对影像进行匹配的预处理,而后合理低编辑好匹配结果、异常影像的扰动区域具体匹配结果,具体编辑内容是居民点、独立的工矿区相关值线逐步匹配至所在地面;构建起DEM的单模型,有效拼接此模型;科学合理低设定好正射影像的参数,并对各模型的正射影像进行制作。另外,在生成正射影像图后,应及时对影像图进行检验,看起是否存在失真、残缺等问题,若存在,应立即采用相应的软件对影像进行自动镶嵌拼接。
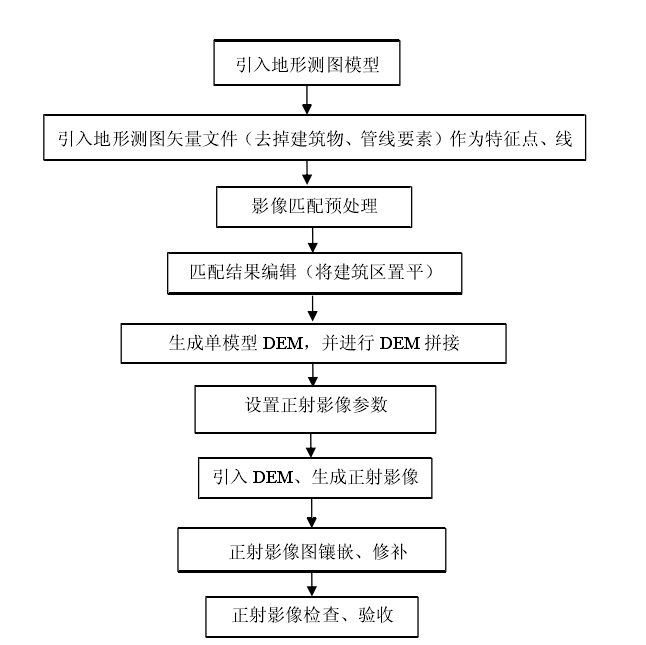
图三(DEM正射影像图制作流程)
2.2.3DEM的制作与质量检验要求
DOM正射的影像所在地面的分辨率务必把控0.1 m内,并作为制图依据;其次,影像图实际色调、饱和度务必均匀,在视觉应达到美观的效果,拼接确保无重影、变形、拉花现象存在;要保证正射影像的平面精度、数学基础等均与特定标准相吻合,影像镶嵌的几何接边无模糊不清、重影现象产生;同个图幅DEM、等高线相互间务必处于同等水平线,高程上偏差务必<等高距;DEM图幅的拼接位置务必要和点高程维持一致性;未达规定的高程精度所在区域,应设高程的推测区;静止水域内DEM的格网点之间高程务必一致,起上下游位置DEM格网点的高程梯度需呈下降趋势。另外,格网间距应保持在1m之内,且元数据文件也要达到准确无误。
2.2.4内业检查
在该线性工程测量中,内业检查内容主要包括对工序流程图和关键检测点以及关键过程和特殊过程的识别与检查,验证测区的地物地貌实际完整性、准确性,以免发生漏测。细致检查各种地物基本几何特征、图幅间的接边,确保其符合相应的设计要求[3]。
2.2.5空中三角测量
由于该线性工程测量过程中采用的加密方式是以光束法区域空中三角测量方式为主,因此,应合理选择空中三角测量系统,保证其先进性和功能性,这样才能逐点量测各外业像控点,像控点实施精准化定位。该测区内平面的高程布设,以大区域的网布点实施方案为主。区域周边,应设好平高点,中间应布设好相应平高的控制点。测区内工需设平高的控制点78个,且选定35个的控制点,以便于检验起内业的精度。
2.2.6制作DEM模型
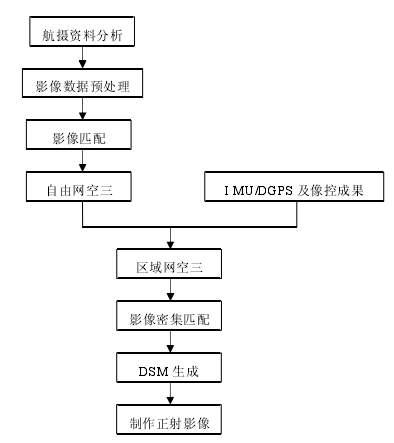
DEM模型具体制作期间,借助DPGrid系统细致全面地采集模型具体特征点及其线等各个要素,再落实DEM拼接,裁切成为单幅各个DEM,再检测DEM的接边。整个模型制作流程如图四所示。
图四(DEM模型制作流程)
2.2.7 制作DOM模型
在制作DOM模型时,主要利用DPGrid系统对单模型DEM进行优化设计,转变成一种单模型式DOM。借助OrthoMosaic自动地镶嵌DOM基础模型,裁切成为单幅DOM,全面地检测、拼接DOM接边,借助PhotoShop系统软件实施DOM调色,制作流程,详细见图五。测区内检测DOM部分的图幅发现,部分图幅内的色调存在着不一致现象,伴有着划痕、斑点、色差等问题。因此,针对这种现象,工作者及时用调色系统软件调色处理好整体图幅,借助单模型相应影像来适当修补好较为不自然的纹理。还采用不同影像单片对图幅中存在的划痕和斑点进行了有效的处理。最后还将线划图与影像图套合来进行对比检查,以最大化确保DOM模型的制作精度。
图五(DOM模型制作流程)
2.2.8 内业质量检查
在该测区中,整个内业操作流程都是严格按照相关技术要求和检验规定来执行,若是在内业过程中出现一些难以解决的技术问题,应及时将实际情况反馈给相关技术负责人,以便可以在第一时间采取有效措施进行处理。另外,要对各关键内业工序进行严格的监控,并作好相应的质量检查记录,以便为整个整个测区产品成果质量的评估提供可靠的参考依据。与此同时,还要对该测区各生产过程实动态实时化跟踪检查,加地物量测、密、Cf}D编辑所有操作过程中,检查点均需设好,而且还要对作业过程中面临的各种问题及处理措施等进行认真记录。除此之外,还要对测区成图精度进行认真的检查,在这一过程中,主要针对DEM高程精度和DOM平面精度进行检查,具体检验标准如下:要将成图期间未用像控点当成DEM高程的精度性检验点,DEM检验点的偏差需把控至0.2022m范围,高程偏差不可超出0.33m范围;有效汇总未成图的整个过程,未用所有像控点当成是DOM平面的精度性检验点,促使DOM平面点偏差把控至0.1190m范围,平面点偏差<0.40m。结合航空摄影的测量技术相应规定,DOM的特征点相对起实地的同名点偏差需小;相对的定向、丘陵地、平地等标准点残余的上下视差需把控0.02mm内。检查点、高地、山地、等标准点的残余上下实际视差需<0.03mm,检查点区域残余上下的视差务必不超出0.04mm;绝对定向结束,控制点所在基本的定向点实际残差,多余部分控制点相应不符参数值、区域网等相互间公共点实际较差,均需低于规定参数值[4]。
3测量中遇到的技术问题和相关解决措施
3.1技术问题
该线性工程测量项目在实施过程中,尽管技术方案设计较为合理,无人机系统技术功能较为完善,且质量各项特性、技术指标全部与特定保证相吻合。但是在某些方面仍存有一定的问题,具体可以从以下几个方面去体现:首先,测区地处城区周边,其周边有着高大的建筑物还有电缆设施,所以很容易对无线电数据传输造成一定影响;其次,由于测区内含有大量的植被,所以若测绘时间确定不合理,势必会给航拍造成一定的阴影影响;第三,由于测区像控点布设大小不符合相应的设计要求,且地标颜色以黑底白色为主,某一架拍照的间距设定倘若合理性欠缺,或实施飞行前期,相机感光度设定稍许偏大,则光线一旦发生变化,就会使得部分影像出现重叠现象,但不会影响内业成图。
3.2解决措施
首先,要结合无人机系统的航拍特点,合理选择飞行场地,并科学布置自驾仪,以便确保飞机起降安全,不会受周围高大建筑及电缆设施等所影响;其次,要结合测区环境,合理选择航拍时间,尽量避开植被阴影过大的时间段;第三,在制作像控地标时,应尽量采用黑底红色的标识,并且规定相关工作人员严格按照相关规定进行制作;第四,在测量阶段,细致检查好仪器设备,保证可与测区测量实际要求相吻合;最后,要全面保证影像数据的清晰度,不得出现影像重叠或漏拍问题。另外,航摄区域要覆盖到整个成图区域,并保证航片的倾角与旋偏角符合相关技术规范要求,如不符,应及时进行补飞[5]。
结束语:
通过对本文线性工程测量中采用的无人机系统技术的全面分析,可以得知,此项技术提交最终成果的精度可满足测绘现实需求、大比例尺的地形图具体需要,无人机整个系统有着小体积、强灵活性等特性,可以随时转场,所以其工作效率及测量精度等要远远高于传统测量技术。通过本次测区工作发现,无人机测量技术的工作量和工作时间大部分集中在内业方面,而外业所用时间则较短。这种技术操作模式可以大大保障工作人员的人身安全,因此,这也是日后测绘行业必然发展的一种趋势,相信随着科学技术水平的不断提高,无人机测量技术也会在更加完善的基础上得到进一步的推广和应用。
参考文献:
[1]邹烈泳. 论无人机遥感技术在测绘工程测量中的应用[J]. 建筑工程技术与设计, 2018, (03):896-897.
[2]王春生, 杨鲁强, 王杨,等. 无人机低空摄影测量系统在水利工程测量中的应用[J]. 测绘通报, 2019,(01):408-410.
[3]王新峰. 无人机航摄测量技术在电力工程测量中的应用[J].工程技术,2019,(03):254-255.
[4]张天奇. 剖析无人机遥感测绘技术在工程测量中的应用[J]. 城市建设理论研究:电子版, 2017, (07):1229-1230.
[5]李党罗, 张进社, 岳赤忠,等. 无人机在工程测量中的应用研究[J]. 科技资讯, 2017(08):136-137.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



