身份证号: 51040219720421****
摘要:我国庞大的用电人口导致输电线路极其复杂, 无人机巡检技术的出现, 能综合考虑现有巡检因素,优化输电线路巡检方案,是解决目前实际输电线路巡检高要求与班组承载力不足矛盾的有效方法,但无人机日常巡检依然会耗费大量人力去执行部分机械操作,本文将简单探讨基于遗传算法输电线路的巡检路径规划方法,以此弥补目前无人机巡检中依然存在的大量固定、机械操作。
关键词:遗传算法;输电线路;无人机;巡检路径规划
前言
目前,为了满足目前巡检的需要,无人机通过其特殊的巡检方法,在线路巡检中被越来越广泛使用。要使无人机实现自主飞行巡检,必须事先巡检无人机巡检路径并导入导航系统。巡检路径包括作业起飞点、降落点、目标点经纬度、高度、云台信息及相机参数等。现在,一般使用的巡检路径计划的方法是操作员按点计算飞行路径,手动将这些数据输入到无人机的导航系统中。计算要求非常准确,计算错误会带来安全隐患。遗传算法对于无人机提示路径具有优秀的全局搜索功能,能够从路径空间快速检索最适合的无人机提示路径。巡检过程中,机器的工作效率决定巡检效率。在无人机巡检过程中,需要事先规划巡检路径。输电线路无人机巡检方法主要分为手动巡检和自动巡检,手动巡检面临着庞大的工作量,同时输电线路一般存在地理环境恶劣、横穿湖山等自然条件,从而导致无法进行无人机手动巡检。因此,使用无人机自主巡检可以极大的提升巡检效率。
输电线路无人机巡检路径
多个对象的路径规划使用遗传算法。由于初始路径是随机生成的,因此初始化过程中会产生更多具有代表性的初始群体,从而提高算法的复杂性和速度。本文使用极坐标对监视对象点进行编码,解决最大路径偏转角、最小步长、最大路径节点数的限制,有效提高无人机巡检的效率和安全性。固定翼无人机进行传输线巡检时,其路径计划受到包括巡检任务和无人机性能参数在内的各种制约的影响。这些限制允许找到安全、适当、有效的传输线无人机巡检。传输线路的无人机巡检路径计划中需要考虑的约束是最大范围、最小步长和最大路径偏移角。路线检测路径规划是找到符合设定空间约束条件的飞行路径。可以使用一系列预设空间的路径节点来计算路径。所有相邻的两个路径节点都通过线段连接。遗传算法是从随机生成的初始群体开始的。初始群体由一定数目的个体组成。在无人机飞行的开始点S和结束点E之间,S和E通过一系列随机的连续折线连接。各个体(染色体)表示选择、交叉、突变的路径作为基本算子。通过选择操作,父代个体(优化路径)以高概率被子代继承。优化后的路径会发生交叉变化。通过交换路径信息来变更巡检路径的基本信息,运用时的巡检路径会更加合适。进化过程结束后,最适合的最大符合值路径将成为无人机飞行路径的最佳解决方案。常规二进制编码由0个字符和1个字符组成。编码、解码和实现相对简单,但搜索路径的灵活性降低,限制了本地搜索最佳路径的功能。极坐标编码方法用于编码巡检路径全体的监视点(节点),构建染色体,建立数学模型。使用无人飞机巡检输电线路的话,工作效率会提高。现在一般使用的无人飞机是四旋翼无人机。四旋翼无人机稍显突出,无负荷时的重量仅为9kg。电池续航约2小时,比其他无人机长。重负荷可以运送20kg,是目前负重最大的无人机类型、,高速巡航速度最快达到60km/h。无人机巡检的高分辨率图像收集装置和无线图像发送装置达成了远程发送和信息收集的目标。
2、无人机巡检路径规划问题描述
2.1飞行姿态
传输线路的状态是静态的,为了有效地巡检线路,无人机的飞行姿势非常重要。可以以正确的飞行姿势顺利地取得图像。妨碍无人机飞行姿势的主要原因是空气流动、风向和操作能力等。想要确保正确的飞行姿势,控制人员需要进行正确的控制,可以应对各种紧急情况和突发情况。
2.2图像预处理和优化技术
为规划输电线路无人机巡检路径的遗传算法主要包括三个遗传运算符:选择算子、交叉算子及变异算子。从路径段种群中选择适当的子路径段,选择不适合突然变异操作的子路径段。交叉算子作用于公共节点的相邻路径段,在节点选择过程中,也可以交换公共节点的路径段信息。无人机巡检技术的核心是,通过搭载在无人机上的图像设备收集传输线的状态,通过传输设备返回控制中心,控制中心进行调查和处理。在整个过程中,收集高品质图像并预处理图像的方法是检验成功的重要因素。图像模糊的原因有各种各样的,如果返回的图像数据模糊的话,有可能会忽略问题。因此,在分析和判断无人机收集的图像信息时,应用合理的图像处理方法非常重要。
3、基于遗传算法的输电线路无人机巡检路径规划
3.1约束条件
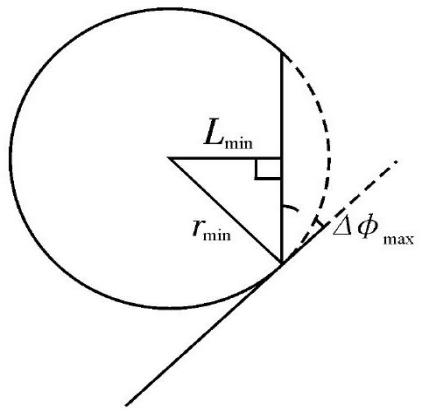
城际间的传输线、城际内的传输线、从发电站到变电站的传输线等,因为有很多种类的传输线,所以由于传输线复杂的环境,无人机的巡检路径受到很多因素的影响。很难找到实际巡检的途径。传输线所面临的限制有无人机的航程、最小步长和最大路径偏移角(图1所示)。
3.2目标函数
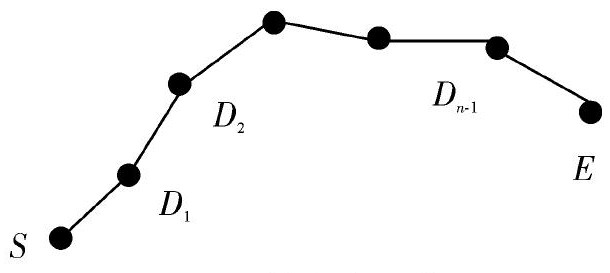
为寻找最优巡检路线,在巡检路线规划时利用函数原理,在空间中寻找符合约束条件的空间点,将空间点连在起义可找到一条巡检路线。在寻找巡检路线时,用S代表一组巡检路线,用D1,D2,…,Dn-1,E序列点来表示,其中S是起始点,E是终点,D1,D2,…,Dn-1是中间路径节点,如图2所示。
利用遗传算法对输电线路无人机巡检进行路径规划,遗传算法运算流程如图3所示。
实际问题参数集

位串解释得到参数
计算目标函数
函数值向适值映射
适值调整
编码成位串
种群1


随机算子
计算适应度值



选择、交叉、遗传
种群1 种群2
选择与遗传
统计结果
种群2
经过优化的一个或多个参数集
解决实际问题
3.3实际的应用
在实际应用中,无人机需要注意几个方面:首先,必须正规化无人机巡检,使用无人机巡检技术建立定期巡检系统。在巡检过程中,可以巡检线路,也可以巡检输电线路的地形并收集数据,主要是利用技术参数对一些较为特殊化的情况和较为特殊化的区域进行实时巡检,另外也要辅助工作人员进行工程的放线操作以及区域内异物的处理工作。
4、结束语
综上所述,无人机技术应用于传输线路的巡检,大大提高了巡检效率,强化了日常巡检能力,延长了传输设备的使用年限。建立巡检算法的数学模型,使用遗传算法规划无人机巡检路径,通过组合无人机性能参数的限制和实际巡检要求,设计适当的函数,基于路径偏转角的编码方式,并计划更合理的无人机飞行路线。实现了无人机输电线路巡回巡检路径的计划,通过模拟验证了算法的有效性,提高了循环巡检的品质和效率,确保了循环巡检的安全性,计算出了实用性高的路径。随着无人机技术的不断进步,无人机可以应对复杂的状况,制约也越来越少,这种新技术被广泛推进以提高电力公司的效率。
参考文献:
[1]马云红,张恒,齐乐融,等.基于改进A*算法的三维无人机路径规划[J].电光与控制,2019,26(10).
[2]史红玉,刘淑芬.基于Voronoi图的无人机航路改进规划[J].吉林大学学报(理学版),2018,56(4).
[3]许幼成,李海军,龙华保.基于遗传算法的四旋翼无人机姿态控制器设计与优化[J].光学精密工程,2012:0-0.
[4]袁麟博,章卫国,李广文.一种基于遗传算法一模式搜索法的无人机路径规划[J].弹箭与制导学报,2009,29(3):279-282.
[5]李大林,李杰,杨东晓.基于PythagoreanHodograph曲线的无人机路径规划方法[J].制造业自动化,2011,33(014):50-54.
[6]饶卫平,杨任农,雷晓义,等.基于多智能体遗传算法的无人机突防航线规划[J].计算机仿真,2015,032(004):39-43.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



