陕西烽火电子股份有限公司 陕西宝鸡 721006
摘要:高增益和大动态范围的信号接收必须在接收机中对信号进行自动增益控制(AGC),给出了一个典型的自动增益控制装置,给出其最优化性能函数,使用递归方法求解性能函数最小值,得到仿真结果。
关键词:自动增益控制 AGC 最优化问题
1 引言
随着通信需求的不断增大和通信技术的不断发展,对接收机的要求和性能提出了良好的线性度、灵敏度、动态范围等更高的要求。为了能够实现接收机中高增益和大动态范围的信号接收,必须在接收机中对信号进行AGC控制。
2 最优化问题
在通信中的许多问题能够被设计成最优化问题,要解决这种问题,有三个步骤:
设定一个目标—选择一个“性能”或“目标”函数。
选择一个实现目标的方法—最大化或最小化这个目标函数。
检验以确定这个方法能达到预期效果。
通过直接求目标函数的导数并置0就可以求得目标函数的极值,但在很多时候,不可能有如此直接的解决方法,所以通常通过递归方法来解决,并且递归方法在信号有很大噪声时有更好的性能。
3 自动增益控制
接收机的目标都是最高效地接收某一平均值的信号,而自动增益控制的目标就是用放大弱信号、削弱强信号的方法使信号尽可能保持在接收机正常工作范围内。传统方法使用模拟电路调整采样前的增益,更先进的方法是利用采样的输入来调整增益,传统方法的优点是增益和采样两个模块独立互相不干扰,数字调整的优点是可以由软件完成,所需要硬件更少。
一个简易的自动增益控制调整的数字系统如图1,输入r(t)乘以增益a后得到标称信号s(t),然后对其采样得到输出s(k),评估模块来衡量s(k),并决定增大或者减小a。
图1
选择a的目标是使s(t)的功率近似地等于某一特定的d²。因为
a²avg(r²(t))|t=kT≈avg{s2(kT)}≈avg{s2[k]} (1)
理想地可以取
 (2)
(2)
avg为求平均。
然而对于估算模块,不论是模拟输入信号r(t)还是其能量都不能直接得到。所以不能直接执行式2。
4 最优化问题应用于自动增益控制
自动增益的目标是使采样信号s(k)的能量和想得到的能量d2之差的函数最小化,即:
 (3)
(3)
如果s2[k]偏离d2,上式对a的值予以纠正。为求得J(a)的最小值,采用递归方法得到
 (4)
(4)
其中u为递归时的步长,
 (5)
(5)
在圆括号里的项a2r2(kT)等于s2[k]。括号外的项 对于评估模块来说无法直接得到,可以用s2[k]/a来近似。将导数代入式(4)中,并在a=a[k]处计算,得到等式
对于评估模块来说无法直接得到,可以用s2[k]/a来近似。将导数代入式(4)中,并在a=a[k]处计算,得到等式
 (6)
(6)
5 仿真结果
通过matlab程序对上述算法进行仿真,选择期望功率0.15,步长u=0.003;控制某个a[k]变换速率可以通过步长u来实现,一个比较大的u允许a[k]较快变化,而一个较小的u使得变化比较平滑,u的选择应该在a[k]的带宽和a[k]的抖动之间综合平衡,执行求平均操作所用的数据长度也将影响更新速率,较长的平均意味着较慢的更新和对增益比较平滑的估算,而较短的平均意味着较快的更新和比较抖动的估算。
其输出如图2,
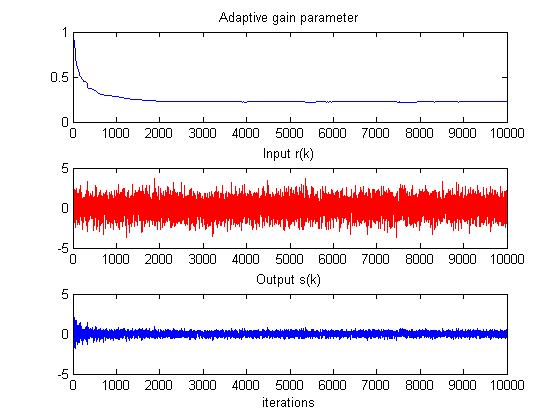
图2
a收敛于0.22,这正是使最小平方目标函数J(a)的最小的a的值。
参考文献:
[1]胡展威,田克纯.熬发良数字通信系统中AGC 电路设计与实现.广西通信技术2011年第3期
[2]胡修林, 张巍峰.数字中频AGC的快速算法设计.《自动化技术与应用》2007年第26卷第1期

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



