中国水利水电第四工程局有限公司 青海海南 811700
摘要:先进PID控制在完成基本控制要求的基础上,在系统快速性、稳定性和准确性等方面均得到了一定的改善。选取水轮机调速系统建立数学模型,以MATLAB为仿真环境对不同的控制算法进行仿真。通过对仿真结果分析可得出,先进PID控制对于系统的超调量、响应时间、抗干扰能力等方面都要优于传统PID控制,从而验证了先进PID控制的优越性。
一、经典PID控制原理
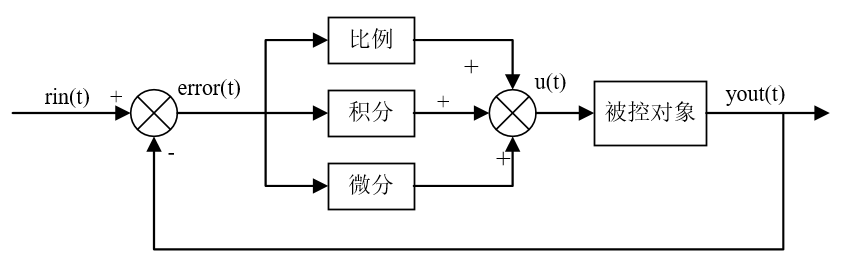 PID控制器是根据系统运行时所测量的输入偏差(error),按照比例(P)、积分(I)、微分(D)的函数关系进行运算,其运算结果用于被控对象的一种控制方法[1]。图1为PID控制系统原理框图,这是由一个模拟PID控制器和被控对象所构成的、最为经典的控制系统。
PID控制器是根据系统运行时所测量的输入偏差(error),按照比例(P)、积分(I)、微分(D)的函数关系进行运算,其运算结果用于被控对象的一种控制方法[1]。图1为PID控制系统原理框图,这是由一个模拟PID控制器和被控对象所构成的、最为经典的控制系统。
图1 PID控制系统原理图
PID控制器是线性控制器,可以根据给定值rin(t)和系统的输出值yout(t)形成的偏差对系统进行控制。
errort(t)=rin(t)-yout(t) (1-1)
将偏差按比例、积分和微分进行数学计算,通过线性组合成控制量,作用于被控对象,所以称为PID控制器。
PID控制规律为
 (1-2)
(1-2)
写为传递函数形式
 (1-3)
(1-3)
当对模拟信号的采样周期满足香农采样定理时,可以用求和代替积分、用后向差分方程代替微分,就可以使模拟的PID控制离散为数字PID控制算法。
数字PID控制算法通常分为数字PID位置型控制算法和数字PID增量型控制算法。
2.1、数字PID位置型控制算法
计算机控制是一种采样控制,根据采样时刻的偏差值计算控制量,因此对连续的模拟信号要进行离散后才可使用。把式(1-2)转换为差分方程,可以对其进行以下近似:
 (1-8)
(1-8)
 (1-9)
(1-9)
数字PID控制算法可由(1-2)、(1-8)、(1-9)计算所得到,如下所式
 (1-10)
(1-10)
或
 (1-11)
(1-11)
2.2、数字PID增量型控制算法
增量式PID控制算法的输出不再是整个被控单元的控制量,而是相对于上一次控制的增量,即Δu(k)。根据递推原则,对式(1-11)进行对推,可得
 (1-12)
(1-12)
增量式PID控制算法如下式
Δu(k)=u(k)-u(k-1) (1-13)
由式(1-11)、式(1-12)、式(1-13)联立可得
 (1-14)
(1-14)
在自适应模糊PID控制器中,把误差error与误差变化率ec作为PID调节器和模糊推理的输入。在控制系统运行的过程中通过error和ec,根据模糊控制规则进行模糊推理,不断地调节PID控制参数,使PID控制达到最优数值时,此时被控系统处于最优状态[3]。
RBF网络监督控制系统的结构原理如图2所示。
图2 神经网络监督控制
神经网络通过对经典的PID控制进行学习,在线改变权值,使 趋近于零,从而使经典PID控制退出控制,神经网络取代经典的PID控制器,最终取消反馈控制,若系统出现扰动反馈控制器重新作用于控制系统中。
趋近于零,从而使经典PID控制退出控制,神经网络取代经典的PID控制器,最终取消反馈控制,若系统出现扰动反馈控制器重新作用于控制系统中。
模糊神经网络用神经网络的输出与输入分别取代模糊控制系统的输出与输入,通过神经网络中的隐含层对隶属函数和模糊规则进行表示,充分利用神经网络处理信息的并行能力提高模糊系统的推理能力,其本质是将常规的神经网络赋予模糊输入信号和模糊权值,学习算法采用神经网络自身的学习算法或是算法的推广的算法。
4、数学建模
图 3所示的贯流式水轮机调解系统的传递函数模型的方块图。
3所示的贯流式水轮机调解系统的传递函数模型的方块图。
图3 贯流式水轮机调解系统的传递函数模型
以贯流式水轮发电机组为模型建模。水流惯性的时间常数为 =1.774s,机组惯性时间常数为
=1.774s,机组惯性时间常数为 =8.5s,主接力器的时间常数为
=8.5s,主接力器的时间常数为 =0.3s,取
=0.3s,取 =1。
=1。
根据水轮机的全特性曲线可计算出水轮机传递函数的各个系数。在额定工况下 。
。
由可得到水轮机的开环传递函数
 (4-1)
(4-1)
将上述的数值代入式(4-1)可得贯流式水轮机组的传递函数为:
 (4-2)
(4-2)
KP=8.5,KI=4.378,KD=0.995。
5、仿真结果
在仿真中,采用数字增量式的PID参数整定方法,扫描时间间隔为0.01s,扫描时间为50s,当扫描时间ts=25s时,加入step=2的阶跃信号作为干扰输入。
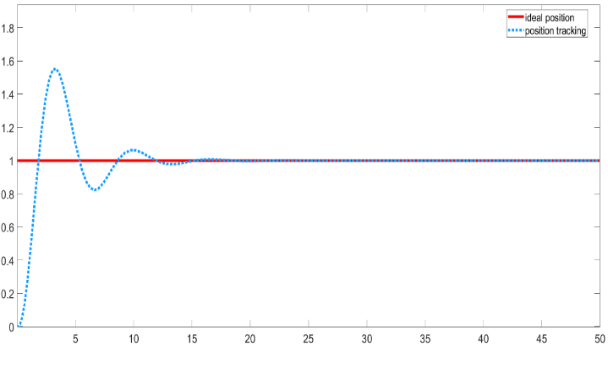
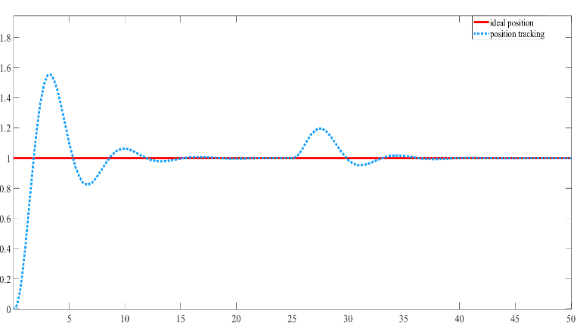
PID调节的闭环控制仿真结果 扰动PID调节的仿真结果

![]()
模糊PID控制仿真结果 扰动模糊PID控制仿真结果
![]()
RBF神经网络PID控制仿真结果 扰动RBF神经网络PID控制仿真结果

![]()
模糊RBF神经网络PID控制仿真 扰动模糊RBF神经网络PID控制仿真
总结:
系统在未加入扰动时,其系统数据。
仿真参数
| 参数 控制方法 | 超调量(%) | 上升时间(s) | 调节时间(s) | 峰值时间(s) |
| 经典PID | 58.7 | 2.35 | 19.80 | 3.34 |
| 模糊控制 | 17.2 | 2.31 | 5.31 | 3.43 |
| RBF神经网络 | 0.3 | 8.25 | 9.08 | 10.36 |
| 模糊RBF网络 | 0.7 | 4.14 | 4.55 | 4.55 |
(2) 加入扰动
系统在加入扰动时,其系统数据如表所示。
扰动仿真参数
| 参数 控制方法 | 正向超调量(%) | 反向超调量(%) | 正向峰值时间(s) | 反向峰值时间(s) |
| 经典PID | 19.7 | 4.72 | 2.45 | 6.01 |
| 模糊控制 | 0.51 | 0.09 | 1.38 | 4.96 |
| RBF神经网络 | 0.01 | 0.04 | 0.49 | 1.53 |
| 模糊RBF网络 | 0.33 | 0 | 1.56 | 0 |
结论:
先进PID控制算法和传统PID控制相比,其优势明显。在相同的被控对象和PID参数的前提下,先进 PID控制算法在超调量、调节时间、抗干扰能力等方面都要优于传统PID控制,进而验证了先进PID控制算法的优越性。
林敏.计算机控制技术及工程应用[M](第三版).北京:国防工业出版社.2017.4,145.
刘金锟.先进PID控制MATLAB仿真[M](第三版).北京:电子工业出版社. 2016.6:308-309.
李岩.模糊PID控制在液位控制中的应用[D].安徽:合肥工业大学,2008.
5

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号