1.中国科学院 合肥物质科学研究院智能机械研究所,安徽合肥 230031; 2.中国科学技术大学,安徽合肥 230026; 3.宁夏农业物联网工程技术研究中心,宁夏银川 750000; 4.安徽省智慧农业工程实验室,安徽合肥 230031
摘要: 为解决农场当地当时的复合肥料精准化配料问题,本研究将水肥一体化智能灌溉施肥系统作为研究对象,构建了水肥浓度智能感知与精准配比系统。首先提出现场在线水肥溶液智能感知模型的快速建立方法,利用数据分析算法从传感器实时监测的一系列浓度梯度的肥料溶液中挖掘出模型。其次基于上述模型设计水肥浓度智能感知与精准配比系统的框架结构,阐述系统工作原理;并通过三种水体模拟在线配肥验证了该系统原位指导水肥浓度配比的有效性,同时评价了水体电导率对水肥配比浓度的干扰。试验结果表明,正则化条件下二阶的多项式拟合曲线是表达溶液电导率与水肥浓度的变化关系最优的模型,相关系数R2均大于0.999,由此模型可得出用户关心的复合肥各指标浓度。三种水体模拟在线配肥结果表明,水体会干扰电导率导致无法准确反演水肥配比的浓度,相对偏差值超过了0.1。因此,本研究提出的在线水肥智能感知与精准配比系统实现了消除当地水体电导率对水肥配比准确性的干扰,通过模型计算实现复合肥精准化配比,并得出各指标浓度。该系统结构简单,配比精准,易与现有水肥一体机或者人工配肥系统结合使用,可广泛应用于设施农业栽培、果园栽培和大田经济作物栽培等环境下的精准智能施肥。
关键词: 水肥一体化;电导率;感知;精准配比;系统建模;多项式拟合
中图分类号: S237 文献标志码: A 文章编号: 202003-SA012
引文格式:金洲, 张俊卿, 郭红燕, 胡宜敏, 陈翔宇, 黄河, 王红艳. 水肥浓度智能感知与精准配比系统研制与试验[J]. 智慧农业(中英文), 2020, 2(2): 82-93.
Citation:JIN Zhou, ZHANG Junqing, GUO Hongyan, HU Yimin, CHEN Xiangyu, HUANG He, WANG Hongyan. Development and testing of intelligent sensing and precision proportioning system of water and fertilizer concentration[J]. Smart Agriculture, 2020, 2(2): 82-93.
1 引 言
在现代农业生产中,将灌溉与施肥结合一同作用于作物根系的水肥一体化技术已逐渐成为趋势,自动灌溉施肥技术被认为是当今世界提高养分利用率的最有效方法之一[1]。灌溉施肥的主要优点是施肥均匀、准确,可以稳定且高精度地控制灌水量、施肥量、施肥时间等参数,从而提高水肥的利用效率,避免肥料施在较干的表土层引起挥发损失、溶解慢,最终导致肥效发挥慢的问题,既节约氮肥又有利于环境保护。水肥一体化技术已广泛应用于设施农业栽培[2]、果园栽培[3]和棉花等大田作物栽培[4],以及经济效益较好的其他作物[5]栽培,并取得了显著的经济和社会效益[6]。因此,研发与推广高效的水肥一体化技术具有重要的应用价值。
水肥一体机的相继面世并通过不断升级优化机械结构显著减少了人力,提升了生产效率[7]。然而,传统水肥机无法在配比过程中获取水肥浓度信息,因而无法实现水肥自动精确配比,也无法实现肥料减施。近几年,智能化水肥一体机通过添加水和肥料的流量传感器用以控制水肥的加入比例,试图间接感知水肥浓度,从而提升肥料的利用率水平[8],此类方法通过实现灌溉液的动态调节从而达到节水增效的目的。学者和科研人员在智能水肥一体化灌溉施肥方面做了很多工作。王成[9]、韦立德[10]和韩启彪[11]分别对传统灌溉施肥系统进行了研究和优化,使得传统施肥器能够直接适用于灌溉施肥自动控制系统;付强等[12]、刘永华等[13]、赵景波等[14]和吴琦等[15]从智能调控设备、智能吸肥设备和智能施肥算法等不同方面开展智能水肥一体化灌溉施肥的研究,显著提升了传统水肥一体化灌溉施肥系统的智能化水平。Yermiyahu等[16]在以色列利用传感器网络对作物水肥状况进行远程监控,实现了一体化的灌溉和施肥。Pawlowski等[17]在西班牙基于事件的温室灌溉过程预测控制方案建立了含水量模型触发作物灌溉施肥系统完成精准水肥施用。Jayakumar等[18]在印度南部研究了椰子的生长参数与自动喷滴灌系统的关联程度,研制出了高性能的椰子灌溉施肥设施。这些工作针对具体作物和特殊场景进行了优化,但缺乏普适性,不具有良好的推广性。智能灌溉施肥硬件也取得了一定发展,水肥一体化设备主要有以色列的Netajet自动灌溉施肥机、Fertijet施肥机
[19],国内的WGF-6-12自动施肥机[20]、SYJ-2型液肥变量施肥机[21]和旁路吸肥式自动施肥机[22]等,推动节水灌溉与施肥于一体的新型农业技术的应用和发展。然而,这些自动施肥机需要对农场的灌溉设施进行升级改造,成本巨大,后期维护成本也较高。
物联网、云计算和人工智能的快速发展,给水肥一体化灌溉施肥带来了新的思路和方法[23]。赵进等[24]研制了一种基于物联网远程控制技术水肥一体化智能系统,将物联网远程控制技术引入水肥一体技术;江新兰等[25]研制了基于两线解码技术的水肥一体化灌溉系统,降低了系统控制结构复杂度;骆东松和姜浩[26]设计了农业水肥一体化智能监测系统,利用物联网和传感器技术实现了远程灌溉和施肥;姜岩等[27,28]将农业专家系统与物联网技术结合,提出了基于专家系统的水肥智能系统,优化了氮肥、磷肥、钾肥的配比。然而,以上智能化水肥一体机主要针对氮、磷、钾的单一肥料种类,而农户实际上采用的是肥料厂家生产的复合水溶肥,建立不同肥料输入和输出装置进行配肥,不仅增加管路系统的复杂性,也显著提高了成本。同时,农户为降低成本,倾向于采用当地自然水体进行配肥。因此,针对复合肥料和当地水体,直接原位准确地感知配比各环节中水肥浓度,从而精确调控水和肥的比例,对显著提升肥料利用率具有重要现实意义。
本研究首先以水肥一体化智能灌溉施肥系统作为研究对象,针对农场当地当时的复合肥料精准化配料需求,创新性地提出可用于现场的水肥浓度智能感知和精准配比思想,从水肥浓度智能感知方法、水肥浓度智能感知建模、水肥浓度智能感知和精准配比系统等几个方面进行了深入研究,提出了一级原位水肥浓度建模子系统与二级水肥精准配比子系统的结构,其中一级原位水肥浓度建模集成了非接触式电导传感器,用以感知水肥浓度,构建了水肥浓度智能感知与精准配比系统,并利用数据分析算法从传感器实时监测的一系列浓度梯度的肥料溶液中挖掘出最优模型。其次设计了水肥浓度智能感知与精准配比系统的框架结构,通过3种水体模拟在线配肥验证了系统的有效性,同时评价了水体电导率对水肥配比浓度的干扰。本研究提出的在线水肥智能感知与精准配比系统具有系统结构简单、水肥配比精准、成本低等优势,易与现有水肥一体机或者人工配肥系统结合使用,可广泛应用于设施农业栽培、果园栽培和大田经济作物栽培等环境下的精准配比和智能施肥,具有实际应用推广价值。
2 试验设计与方案
2.1 仪器与试剂
水肥感知与配比模型试验所需仪器和设备:MSP60-3A注射泵(慧宇伟业(北京)流体设备有限公司),雷磁DDSJ-308A型电导率仪(带两支铂黑电导率探头,电极常数和量程分别为k=0.957,2~20,000  S/cm;k=10.57,2~200 mS/cm;上海仪电科学仪器股份有限公司);分析天平(北京赛多利斯仪器公司);超声波清洗器(昆山市超声仪器有限公司)。
S/cm;k=10.57,2~200 mS/cm;上海仪电科学仪器股份有限公司);分析天平(北京赛多利斯仪器公司);超声波清洗器(昆山市超声仪器有限公司)。
水肥感知与配比模型试验所需试剂和材料:芭田水溶肥料13-6-40(深圳市芭田生态工程股份有限公司),芭田水溶肥料20-20-20(深圳市芭田生态工程股份有限公司),超纯水(18.25 MΩ·cm),150 mm定量滤纸(生工生物工程(上海)股份有限公司)。
水样采集与前处理:采集安徽省合肥市董铺水库水体,用定量滤纸进行过滤,滤液作为水肥在线配比试验的水库水。直接收集安徽省合肥市自来水厂市政供水作为自来水体。
2.2 试验方案
为解决农场复合肥料精准化配料问题,本研究建立如图1所示的试验方案:将复合肥料进行标准化检验,获得各项指标的具体数值;在实验室采用纯水配置一系列浓度梯度的复合肥溶液,进行电导率测试试验;获取的电导率数据进行水肥感知模型构建,通过回归拟合筛选出最优模型;设计搭建硬件水肥精准配比硬件系统;采集自然水体,在硬件系统中通过先投肥料再持续加液的方式模拟农场复合肥料配比,在每个浓度特征点即时采集水肥溶液中电导率参数;通过筛选出的最优模型指导自然水体配肥的模型校验,并进行模型评价。

图1 试验方案技术路线
Fig.1 Technical route of test scheme
标准数值建立:试验选取同一批次的两种芭田水溶肥料,各称取500 g水溶肥料样品送检至安徽省产品质量监督检验研究院,委托对肥料中总氮(N)、五氧化二磷(P2O5)、氧化钾(K2O)等指标按照NY1107-2010标准进行检验,各指标的检验值作为建立水肥浓度智能感知模型的基准。
水肥模型建立试验的前处理:分别称取两种水溶肥料,超纯水定容,放入超声波清洗器内溶解,分别配比成一系列浓度梯度的待测溶液。为了贴近农业生产实际配比值,依据复合肥厂家对不同作物施肥的配比建议,并在此基础上适当扩大梯度范围,确保农户施肥的配比值被标准曲线覆盖,试验中的肥料与水的配比浓度梯度选用为1:50、1:100、1:150、1:200、1:250、1:300、1:400和1:500共计8个浓度水平。
电导率测试:试验体系中引入温度电极对电导率测试数据进行修正,保证试验装置可以适用于现场检测。试验过程中将温度补偿电极与铂黑电导率探头一起依次插入待测溶液中,待测量值稳定,进行读数。测试样品之间用纯水反复冲洗电导率探头并擦干吹干,确保无交叉污染。
水肥浓度智能感知与精准配比系统试验:为了探究自然水体对水肥智能配比系统的影响,并在后台系统中修正水体本身电导率引入的误差,试验体系设计三种不同水体进行配肥试验测试对比。三种水体分别为:安徽省合肥市董铺水库水过滤后的滤液、合肥蜀山区自来水和超纯水,分别采用带有温度补偿的电导率电极进行电导率测试。在实验室环境模拟水肥浓度智能感知与精准配比系统的原位使用,试验时三种水体的水温均为17℃。将MSP60-3A型注射泵的进口管路插入试验水体的桶中,出口管路放置在配肥池的烧杯内壁,称取2 g芭田13-40-6水溶肥料加入烧杯内,温度补偿电极与铂黑电导率插入烧杯内。试验时,注射泵每次自动注入50 mL容量的试验水体,每次注入间隔为60 s,用以搅拌均匀与电导率读数。
2.3 水肥浓度智能感知方法
智能感知是根据多传感器所提供的多源信息,经过智能信息分析和处理,实现对环境和对象的认知,从而使基于经验判断和智能处理的决策成为可能。现代智能感知系统的首要任务是从各种传感信息中抽取对象的各种特征,并利用对象的特征信息来确定目标和环境的属性,构建特征和目标属性的关系模型,从而完成智能感知的完整过程。
针对复合肥料配比中的快速智能感知问题,本研究提出一种新的思路,通过提前建立当时当地复合肥关键特征与水溶肥浓度关系的模型,后期在实际水肥配比工作中,基于模型即可准确得知配肥池中氮磷钾各指标的浓度。因此需首先探究如何合理地构建复合肥料配比的智能感知模型。
本研究将温度补偿电极与铂黑电导率探头用于快速感知时序变化的水肥溶液浓度特征信息,依据电导率值变化进行水肥控制是水肥一体化的有效方法[29],实时提取水肥溶液的电导率值作为关键特征信息。当水肥溶液的关键特征被获取后,实时利用后台参数拟合算法学习出当时当地采用复合肥预测水肥浓度的回归模型,再通过模型准确得知配肥池中的氮磷钾各项指标浓度。
为了对比评价原位水肥浓度智能感知模型建立的准确性,本研究重点是通过分析不同阶数和不同正则化项的回归模型,建立水肥浓度与电导率的关系,确定水肥浓度智能感知模型的最佳表达形式。基于统计回归分析,每种水肥的浓度对溶液的电导率变化规律可用曲线函数表示为:
 (1)
(1)
其中, 代表水肥浓度,g/L;
代表水肥浓度,g/L; 代表电导率值,mS/cm;
代表电导率值,mS/cm; 为函数拟合后的系数,本研究通过两种方法对系数进行求解。
为函数拟合后的系数,本研究通过两种方法对系数进行求解。
第一种是根据常规分析测定中标准曲线回归的方法进行多项式回归拟合,即利用函数 去拟合水肥试验数据,并使得损失函数 最小,其中 可以表示为:
最小,其中 可以表示为:
 (2)
(2)
其中, 为试验水肥浓度测试值数量;
为试验水肥浓度测试值数量; 为试验实际测试的水肥浓度值,g/L。
为试验实际测试的水肥浓度值,g/L。
第二种是引入正则化项。变量过多的时候,曲线能很好地拟合训练数据,但是,这样的曲线会出现过拟合现象,导致它无法泛化到新的数据样本中。此方法利用系数 构造一个惩罚函数,实现对变量的选择,正则化的损失函数
构造一个惩罚函数,实现对变量的选择,正则化的损失函数 一般可以表示为:
一般可以表示为:
 (3)
(3)
其中,正则化项 可以是模型参数向量的范数,通常用的有
可以是模型参数向量的范数,通常用的有 范数和
范数和 范数。
范数。
基于水肥浓度与电导率拟合曲线,融入复合肥料N、P2O5和K2O的基准标准数值,分别拟合出水肥中N、P2O5和K2O各指标浓度与电导率的关系式:

 (4)
(4)
其中, 代表N、P2O5和K2O各项指标的浓度,g/L; 代表电导率值,mS/cm; 代表经过标准化检测的各项指标的含量百分比基准值;
代表经过标准化检测的各项指标的含量百分比基准值; 分别为各项指标函数拟合后的系数。
分别为各项指标函数拟合后的系数。
3 试验结果与讨论
3.1 复合肥料检验值
为了更精确地评价不同回归曲线,委托安徽省产品质量监督检验研究院对本研究采购的两种水溶肥进行了标准化检测。两种水溶复合肥N、P2O5及K2O含量的详细数据展示在表1中,这些数据将作为基准值。
表1 两种水溶肥的各指标的检验值
Table 1 Index of testing values of two water-soluble fertilizer
N含量/% | P2O5含量/% | K2O含量/% | |
芭田20-20-20 | 20.5 | 19.5 | 19.8 |
芭田13-6-40 | 12.5 | 7.5 | 39.7 |
3.2 水肥浓度智能感知模型构建
针对复合肥料配比中的智能感知问题,研究通过感知每种复合肥料配比中关键浓度点,建立电导率与水溶肥浓度关系的回归模型的方法来实现。本节探讨构建复合肥料配比的智能感知模型的合理性。
表2是采用的两种肥料在8个浓度水平下的电导率检测结果,这些关键特征浓度点为建立回归模型提供支持。表2结果表明,溶液电导率和溶液浓度呈正相关,浓度越大电导率越高。根据水肥浓度智能感知方法对两种肥料进行不同阶的曲线拟合,溶液的电导率与水肥浓度的变化关系可以分别用图2的不同曲线进行描述。
表2 两种水溶肥在不同浓度下电导率
Table 2 Conductivity values of two water-soluble fertilizer at different concentrations
水溶肥浓度/(g·L-1) | 芭田20-20-20电导率/(mS·cm-1) | 芭田13-6-40电导率/(mS·cm-1) | |
1 | 20.00 | 9.637±0.019 | 17.747±0.076 |
2 | 10.00 | 5.340±0.014 | 9.737±0.019 |
3 | 6.67 | 3.817±0.009 | 7.003±0.045 |
4 | 5.00 | 2.903±0.005 | 5.313±0.038 |
5 | 4.00 | 2.547±0.005 | 4.227±0.019 |
6 | 3.33 | 2.023±0.009 | 3.693±0.009 |
7 | 2.50 | 1.730±0.003 | 2.347±0.033 |
8 | 2.00 | 1.427±0.001 | 2.017±0.012 |
图2(a)和图2(b)分别是芭田20-20-20和芭田13-6-40两种水肥溶液浓度的多项式拟合曲线,溶液的电导率对肥料浓度变化关系由1阶到6阶的曲线图和对应相关指数R2表示。
由结果可见,曲线的相关指数R2大于0.95,均达到显著水平,一阶到二阶拟合曲线的相关指数R2从0.995到0.999有明显提高,说明二阶拟合曲线对比一阶拟合曲线的精度更高,拟合度更好,更接近实际浓度。多项式阶数的进一步增加相关指数没有显著变化,而且随着阶数和样本特征增加,当样本数相对较少时,上图中的高阶曲线拟合过程容易使得模型陷入过拟合。
|
图2 两种水肥多项式曲线拟合
Fig. 2 Polynomial curve fitting of two water-soluble fertilizer
为缓解过拟合问题,本研究采用第二种方法对芭田13-40-6水肥溶液不同阶的曲线拟合,即引入正则化项,最终目标函数在平均损失函数上增加不同的正则化项,从而选择模型误差和模型复杂度同时较小的模型。如图3所示,芭田13-40-6多项式回归的基础上对目标函数正则化,分别利用 范数, 范数结合 范数建立多项式回归的正则项,对应的损失函数分别是:


其中, ,
, ,分别表示 范数的系数和 范数的权重。肥料进行不同阶的曲线拟合,损失函数正则化后的拟合曲线如图2所示。
,分别表示 范数的系数和 范数的权重。肥料进行不同阶的曲线拟合,损失函数正则化后的拟合曲线如图2所示。
|
图3 芭田13-40-6正则化曲线拟合比较
Fig. 3 Comparison of regularization polynomial curves fitting of BATIAN13-40-6
正则化项是多项式系数的单调递增函数,最小化损失函数的过程中,经验风险越小模型偏差越小,而复杂度越高;模型越复杂,正则化项取值越大,从而限制模型的复杂度。对比正则化前后的曲线图2(a),图3(a)和图3(b),随着多项式阶数的增加,标准多项式拟合曲线图2(a)存在偏离,而正则化后的多项式拟合曲线图3(a)和图3(b),在高阶拟合曲线情况下正则化取值增大,模型变量受到限制,避免了过拟合现象的出现。
综合不同多项式拟合曲线的结果,正则化条件下二阶的多项式拟合曲线在数据经度,模型复杂度和鲁棒性方面是水肥浓度智能感知模型的最优表达形式,实际的拟合曲线函数和其养分指标关系式分别如下。
芭田13-40-6浓度:
 (7)
(7)
芭田13-40-6 N浓度:
 (8)
(8)
芭田13-40-6 P2O5浓度:
 (9)
(9)
芭田13-40-6 K2O浓度:
 (10)
(10)
芭田20-20-20浓度:
 (11)
(11)
芭田20-20-20 N浓度:
 (12)
(12)
芭田20-20-20 P2O5浓度:
 (13)
(13)
芭田20-20-20 K2O浓度:
 (14)
(14)
上述式中x是水肥溶液电导率值,mS/cm;y是对应养分指标的浓度值,g/L。由此得出,通过建立这种水肥配比过程中浓度与电导率的关系,在测定水肥溶液中的电导率后,可以得出用户关心的N、P2O5和K2O各主要指标的具体浓度数值,为用户精准施肥提供参考依据。同时,这也说明电导率反演水肥中各指标浓度具有可操作性,为下一步建立水肥浓度智能感知与精准配比系统提供依据。
4 水肥浓度智能感知与精准配比系统设计
4.1 结构设计
面对实际生产中复合肥料的智能感知与精准配比问题,在完成合理的复合肥料配比的智能感知模型构建后,本研究提出基于在配肥现场原位电导率速测的两级水肥配比系统作为智能感知的模型构建的硬件载体。此配比系统包括一级水肥浓度智能感知模型建立子系统与二级水肥精准配比子系统,水肥一体配肥系统结构如图4所示。
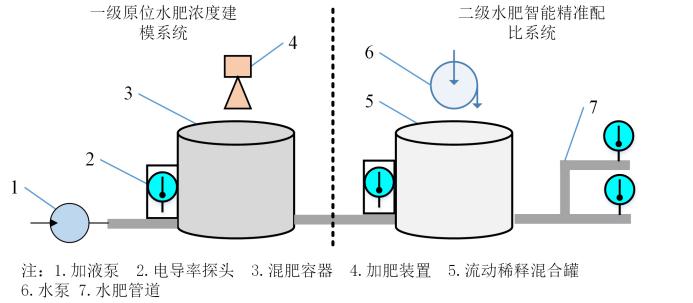
图4 水肥一体配肥系统结构图
Fig. 4 Structure diagram of fertilizer proportioning system
using integration of irrigation and fertilization
一级系统设计为便携式装置,亦可与现有传统水肥系统兼容,主要基于在线原位电导率探头自动采集水肥溶液的电导率数据,实时构建水肥浓度智能感知模型。一级系统主要包括一台精密的加液泵,可实现准确定量加液;一只大量程在线电导率探头,一只水肥配比塑料桶,以及配套的控制、感知与模型建立软件。二级系统设计为动态精准配肥装置,在水肥浓度智能感知模型的基础上,依据不同肥料浓度需求进行配肥决策,自动进行肥料浓度的配比。二级系统主要包括一台加液水泵,支持定量加液控制;一只大量程在线电导率探头,用于实时检测水肥浓度变化,并反馈给配肥控制机构;一只流动稀释混肥罐,一个复合肥加肥装置,用来按需添加和存储肥液,一套施肥管路用于水肥传输,以及配套的用户交互、控制软件。
4.2 水肥配比系统试验和模型校验
前期走访调研发现,农户为节约成本,配肥过程中采用的水体种类繁多。考虑到农场当时当地配肥所用水体的水质问题,为了探究水体本身的电导率是否与实验室采用纯水建立的模型的不同、是否会干扰水肥智能配比系统等问题,同时,农场采用流动注水方式配肥,与实验室提前配制样本溶液、再逐一检测的方式不同,本研究建立了一种近似原位配肥环境的装置与方法,试图实现在现场即时建立匹配当地水体的水肥浓度智能感知模型,用以指导农户精确配肥。通过不同水体的配比试验从而验证本研究提出的水肥智能感知配比系统在面对当时当地的水体具有较好的宽容性与一致性,实现从试验环境到生产环境的推广。
如图5所示,本研究在实验室搭建了一级配比系统试验装置,试验前称量2 g芭田13-40-6水溶肥料加入烧杯内。

图5 一级配比系统试验装置
Fig. 5 Experimental device of primary fertilizer proportioning system
考虑到复合肥厂家提供的对不同作物施肥的几种建议配比,并在此基础上适当扩大了梯度范围,确保农户施肥的配比值被标准曲线覆盖,试验的肥料与水的配比浓度梯度选用为1:25、1:50、1:75、1:100、1:125、1:150、1:175、1:200、1:225、1:250、1:275、1:300、1:325、1:350、1:375、1:400、1:425、1:450、1:475和1:500。试验采用精密注射泵按设置好的浓度梯度自动加入确定体积的水量,严格控制肥料重量与加液体积实现与实验室同等精度的配比。每个配比浓度加液完成后停留30 s,搅拌并多次测量电导率值,电导率值依次输入软件,进行建模分析。试验中,选取纯水作为对照组,选取过滤后的董铺水库水和自来水作为试验组,三组各配比浓度梯度对应的电导率值如表3所示。
表3 三种水样不同配比水肥的电导率测试值
Table 3 Conductivity value of water-soluble fertilizer with three water samples
单位:mS·cm-1
纯水 | 水库水 | 自来水 | 配比 | 纯水 | 水库水 | 自来水 | |
1:25 | 33.733±0.047 | 34.900±0.000 | 34.367±0.262 | 1:275 | 3.947±0.005 | 4.220±0.000 | 4.160±0.000 |
1:50 | 18.227±0.019 | 18.870±0.028 | 18.777±0.034 | 1:300 | 3.650±0.000 | 3.920±0.000 | 3.850±0.008 |
1:75 | 12.730±0.000 | 13.220±0.000 | 13.127±0.019 | 1:325 | 3.390±0.00 | 3.653±0.005 | 3.593±0.005 |
1:100 | 9.850±0.000 | 10.243±0.005 | 10.173±0.031 | 1:350 | 3.163±0.005 | 2.890±0.000 | 3.373±0.005 |
1:125 | 8.070±0.000 | 8.430±0.000 | 8.340±0.014 | 1:375 | 2.610±0.000 | 2.750±0.000 | 2.683±0.005 |
1:150 | 6.827±0.005 | 7.180±0.000 | 7.093±0.009 | 1:400 | 2.470±0.000 | 2.617±0.009 | 2.550±0.000 |
1:175 | 5.947±0.012 | 6.263±0.005 | 6.193±0.009 | 1:425 | 2.340±0.000 | 2.490±0.000 | 2.440±0.000 |
1:200 | 5.263±0.009 | 5.570±0.000 | 5.507±0.005 | 1:450 | 2.230±0.000 | 2.387±0.005 | 2.330±0.000 |
1:225 | 4.727±0.005 | 5.023±0.005 | 4.960±0.00 | 1:475 | 2.130±0.000 | 2.287±0.005 | 2.230±0.000 |
1:250 | 4.300±0.000 | 4.580±0.000 | 4.527±0.005 | 1:500 | 2.043±0.005 | 2.200±0.000 | 2.140±0.000 |
注:表中配比是肥料和水的配比比例,即每克肥料对应多少毫升水样 | |||||||
根据水肥浓度智能感知模型构建方法对芭田13-40-6不同水质条件下的溶液的电导率与水肥浓度的变化关系进行曲线拟合,正则化采用 范数结合 范数,各阶曲线的拟合结果如图6所示。对比图中曲线,不同水质配比的水肥溶液电导率和溶液浓度呈正相关,浓度越大电导率越高,曲线的相关指数均达到显著水平。芭田13-40-6不同水质条件下拟合误差如表4所示,随着拟合阶数的增大,数据点偏差逐渐减小,二阶拟合曲线在偏差指标回归平方和满足小于1的条件下残差平方和最小,精度和拟合程度达到最佳。同时拟合曲线的相关指数R2在高阶拟合随阶数减小,表明复杂模型拟合过程容易陷入过拟合状态。
| |
图6 芭田13-40-6不同水质曲线拟合
Fig. 6 Curve fitting of different water samples for BATIAN 13-40-6
表4 芭田13-40-6三种水样曲线拟合误差
Table 4 Fitting error of three water samples for BATIAN 13-40-6
误差类型 | 1阶 | 2阶 | 3阶 | 4阶 | 5阶 | 6阶 | |
纯水 | 回归平方和 | 5.162 | 0.556 | 0.212 | 0.316 | 1.859 | 21.800 |
残差平方和 | 1500.725 | 1511.891 | 1521.856 | 1531.187 | 1562.464 | 1685.376 | |
水库水 | 回归平方和 | 5.777 | 0.890 | 0.303 | 0.414 | 1.972 | 25.465 |
残差平方和 | 1496.672 | 1509.169 | 1518.946 | 1526.241 | 1562.570 | 1700.327 | |
自来水 | 回归平方和 | 5.906 | 0.754 | 0.341 | 0.382 | 2.511 | 18.547 |
残差平方和 | 1499.789 | 1510.319 | 1522.281 | 1526.101 | 1569.389 | 1670.050 | |
注:回归平方和是各项Y估计值减去平均值的平方的和,残差平方和是各项Y真实值减去测量值的平方的和 | |||||||
对比不同阶多项式拟合曲线,二阶的多项式拟合曲线在数据精度,模型复杂度和鲁棒性方面是建模更好的选择,不同水质下的水肥浓度拟合曲线如下,其中x是水肥溶液电导率值, mS/cm;y是对应水质的水肥浓度值, g/L。
自来水:
 (15)
(15)
纯水:
 (16)
(16)
水库水:
 (17)
(17)
自来水、纯水和水库水三种水体的测量电导率依次为0.992、185和279 S/cm。依次采用三种水体配比水肥浓度对电导率的拟合曲线如图7所示,不同水体本底的电导率对水肥浓度的影响不同。

图7 芭田13-40-6不同水质曲线拟合比较
Fig. 7 Comparison of curve fitting of different water samples for BATIAN13-40-6
由三种水体的拟合公式与图7曲线对比可知,不同水体影响水肥配比后肥液的电导率数值,同样的水肥浓度下,水体电导率越大,肥液的电导率相应增大,说明水体电导率越大对水肥溶液电导率的影响越大,不同水体干扰了电导率准确反演水肥配比的浓度。因此,需进一步分析不同水体对水肥溶液电导率的影响。本研究通过数据拟合模型计算不同电导率下两种自然水体配肥的浓度相对纯水配肥浓度的偏差,从而评估水体电导率对水肥配比准确性的影响。自来水、水库水的电导率与水肥浓度相对偏差的关系曲线如图8所示,相对偏差 的计算公式为:
的计算公式为:
 (18)
(18)
其中, 为自然水体(自来水、水库水)在特定电导率下对应的浓度,g/L;
为自然水体(自来水、水库水)在特定电导率下对应的浓度,g/L; 为纯水在特定电导率下对应的浓度,g/L。
为纯水在特定电导率下对应的浓度,g/L。

图8 不同水质对电导率影响关系
Fig. 8 Effect on conductivity of different water samples
由图8可知,不同水体对溶液浓度的准确感知会产生影响,水体电导率越大,配肥的浓度误差越大。随着溶液电导率的增大,水质对溶液浓度的影响将逐渐降低。在低浓度水肥检测中,水体对电导率检测水肥浓度方法的干扰不可忽视,水肥浓度相对偏差值甚至超过了0.1,这将对实际生产作业产生较大影响。因此,在建立水肥浓度智能感知模型时需对水体作为重要因素进行考虑。这进一步说明本研究提出的建立原位水肥模型的系统具有重要意义,可以消除当地水体电导率的干扰因素,从而确保了水肥配比系统的准确性。
据此,本研究提出基于原位电导率速测的两级水肥配比系统,可以针对复合肥料与当地水体进行定制化的精准配肥,通过现场快速建立所用肥料与水体的智能感知模型,可以消除当地水体本底电导率对水肥浓度的干扰。建立的配肥模型可以直接指导在二级水肥智能配比系统中进行的配肥。通过测试二级水肥智能配比系统中的电导率,可直接告知用户N、P2O5和K2O各主要指标的具体浓度数值。
5 结 论
本研究通过将水肥一体化智能灌溉施肥系统作为研究对象,针对农场当地当时的复合肥料精准化配料问题,提出一级原位水肥浓度建模子系统与二级水肥精准配比子系统的结构,在一级子系统中构建水肥浓度智能感知模型,消除当地水体电导率对水肥配比准确性的干扰,实现水肥浓度智能感知与精准配比系统。本研究利用数据分析算法从传感器实时监测的一系列浓度梯度的肥料溶液中挖掘出模型,正则化条件下二阶的多项式拟合曲线是表达溶液的电导率与水肥浓度的变化关系最优的模型,由模型可得出用户关心的各指标浓度。通过建立流动配肥装置并建立三种水体的配肥模型,深入探究了三种水体的电导率对水肥配比准确性的影响,从而确定了水体对电导率检测水肥浓度方法的干扰不可忽视。
本研究提出的在线水肥感知与配比系统具有系统结构简单,自动化程度高、水肥精准配比,易与现有水肥一体机或者人工配肥系统结合使用的优势,可广泛应用于设施农业栽培、果园栽培和大田经济作物栽培等环境下的精准施肥。
参考文献:
[1] 徐志龙, 乔晓君. 自动灌溉施肥机在设施生产中的应用[J]. 农业工程技术(温室园艺), 2008(6): 15-16.
XU Z, QIAO X. Application of automatic irrigation and fertilizer applicator in facility production[J]. Agriculture Engineering Technology (Greenhouse & Horticulture), 2008(6): 15-16.
[2] 李友丽, 李银坤, 郭文忠, 等. 有机栽培水肥一体化系统设计与试验[J]. 农业机械学报, 2016, 47(S1): 273-279.
LI Y, LI Y, GUO W, et al. Design and test of integrated water and fertilizer system in organic cultivation[J]. Transactions of the CSAM, 2016, 47(S1): 273-279.
[3] 章伟. 渭北旱塬苹果及葡萄水肥一体化技术研究[D]. 杨凌: 西北农林科技大学, 2016.
ZHANG W. Application of fertigation in apple and grape orchard in Weibei arid plateau[D]. Yangling: Northwest A&F University, 2016.
[4] 高玉山, 孙云云, 刘方明, 等.玉米膜下滴灌水肥一体化技术研究进展[J]. 玉米科学, 2016, 24(6): 155-159.
GAO Y, SUN Y, LIU F, et al. Research progress of maize fertigation with drip irrigation under mulching film[J]. Journal of Maize Sciences, 2016, 24(6): 155-159.
[5] 刘思汝, 石伟琦, 马海洋, 等. 果树水肥一体化高效利用技术研究进展[J]. 果树学报, 2019, 36(3): 366-384.
LIU S, SHI W, MA H, et al. Advances in research on efficient utilization of fertigation in fruit trees[J]. Journal of Fruit Science, 2019, 36(3): 366-384.
[6] 李永梅, 陈学东, 李锋, 等. 宁夏枸杞水肥一体化智能控制技术应用效益[J]. 江苏农业科学, 2018, 46(21): 160-163.
LI Y, CHEN X, LI F, et al. Application benefits of water and fertilizer integration intelligent control technology for Lycium Barbarum[J]. Jiangsu Agricultural Sciences, 2018, 46(21): 160-163.
[7] 吴松, 李国辉. 水肥一体化灌溉系统中的施肥设备[J]. 农业技术与装备, 2018(10): 78-80, 83.
WU S, LI G. Fertilizer applying equipment in water and fertilizer integrated irrigation system[J]. Agricultural Technology & Equipment, 2018(10): 78-80, 83.
[8] 韩启彪, 冯绍元, 黄修桥, 等. 我国节水灌溉施肥装置研究现状[J].节水灌溉, 2014(12): 76-79, 83.
HAN Q, FENG S, HUANG X, et al. Research on fertilizer injection units in saving-water irrigation in China[J]. Water Saving Irrigation, 2014(12): 76-79, 83.
[9] 王成. 滴灌系统常用施肥装置操作要点及优缺点分析[J]. 现代农业科技, 2015(9): 234, 238.
WANG C. Analysis on operation points, advantages and disadvantages of common fertilizer devices in drip irrigation system[J]. Modern Agricultural Science and Technology, 2015(9): 234, 238.
[10] 韦立德. 低压灌溉系统文丘里混肥器变量施肥调控方式研究[D]. 昆明: 昆明理工大学, 2018.
WEI L. Study of variable fertilization controlling method of Venturi fertilizer applicator under low pressure irrigation System[D]. Kunming: Kunming University of Science and Technology, 2018.
[11] 韩启彪. 滴灌压差施肥浓度变化及其对水肥分布影响研究[D]. 扬州: 扬州大学, 2018.
HAN Q. Research on solute concentration change in drip fertigation of differential pressure and its effect on water and nitrogen distribution[D]. Yangzhou: Yangzhou University, 2018.
[12] 付强, 梅树立, 李莉, 等.水肥一体化智能调控设备智能液位开关设计[J]. 农业机械学报, 2015, 46(S1): 108-115.
FU Q, MEI S, LI L, et al. Intelligent switcher design in water and fertilizer integration equipment[J]. Transactions of the CSAM, 2015, 46(S1): 108-115.
[13] 刘永华, 沈明霞, 蒋小平, 等. 水肥一体化灌溉施肥机吸肥器结构优化与性能试验[J]. 农业机械学报, 2015, 46(11): 76-81, 48.
LIU Y, SHEN M, JIANG X, et al. Structure optimization of suction device and performance test of integrated water and fertilizer fertigation machin[J]. Transactions of the CSAM, 2015, 46(11): 76-81, 48.
[14] 赵景波, 张文彬, 朱敬旭辉, 等.智能混肥控制系统水肥浓度控制策略研究[J]. 农机化研究, 2020, 42(5): 236-242.
ZHAO J, ZHANG W, ZHU J, et al. Study on water and fertilizer concentration control strategy of intelligent mixed fertilizer control system[J]. Journal of Agricultural Mechanization Research, 2020, 42(5): 236-242.
[15] 吴琦, 詹宇, 于家旋, 等. 基于混合蚁群算法和变论域模糊控制的混肥系统设计[J]. 中国农机化学报, 2019, 40(7): 146-150.
WU Q, ZHAN Y, YU J, et al. Design of water and fertilizer mixing system based on hybrid ant colony algorithm and variable domain fuzzy control[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(7): 146-150.
[16] YERMIYAHU U, TAL A, BEN-GAL A, et al. Rethinking desalinated water quality and agriculture[J]. Science, 2007, 318(5852): 920-921.
[17] PAWLOWSKI A, SÁNCHEZ-MOLINA J A, GUZMÁN J L, et al. Evaluation of event-based irrigation system control scheme for tomato crops in greenhouses[J]. Agricultural Water Management, 2016, 183: 16-25.
[18] JAYAKUMAR M, JANAPRIYA S, SURENDRAN U. Effect of drip fertigation and polythene mulching on growth and productivity of coconut (Cocos nucifera L.), water, nutrient use efficiency and economic benefits[J]. Agricultural Water Management, 2017, 182: 87-93.
[19] FEDLER J. Israeli agriculture: Coping with growh[N]. Jerusalem Post, 2001: 5-18.
[20] 左志宇, 毛罕平, 魏新华, 等. WGF-6-12型温室自动灌溉施肥机的研制[C]// 中国农业工程学会2011年学术年会论文集. 北京, 中国: 中国农业工程学会, 2011.
ZUO Z, MAO H, WEI X, et al. Development of WGF-6-12 automatic greenhouse fertigation machine[C]// Proceedings of 2011 Annual Meeting of China Society of Agricultural Engineering. Beijing, China: Chinese Society of Agricultural Engineering, 2011.
[21] 王金武, 潘振伟, 周文琪,等. SYJ-2型液肥变量施肥机设计与试验[J]. 农业机械学报, 2015, 46(7): 53-58.
WANG J, PAN Z, ZHOU W, et al. Design and test of SYJ-2 type liquid variable fertilizer[J]. Transactions of the CSAM, 2015, 46(7): 53-58.
[22] 田莉, 李家春, 吴景来, 等. 旁路吸肥式水肥一体化自动施肥机的设计与试验[J].节水灌溉, 2018 (11): 98-102, 106.
TIAN L, LI J, WU J, et al. Design and experiment of bypass fertilizer-type water and fertilizer integrated automatic fertilizer applicator[J]. Water Saving Irrigation, 2018 (11): 98-102, 106.
[23] WANG M, TANG Y, HAO H, et al. The design of agricultural machinery autonomous navigation system based on linux-ARM[C]// Advanced Information Management, Communicates, Electronic and Automation Control Conference.Piscataway, New York, USA: IEEE, 2016.
[24] 赵进, 张越, 赵丽清, 等.水肥一体化智能管理系统设计[J]. 中国农机化学报, 2019, 40(6): 184-190.
ZHAO J, ZHANG Y, ZHAO L, et al. Design of integral management system of water and fertilization[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(6): 184-190.
[25] 江新兰, 杨邦杰, 高万林, 等. 基于两线解码技术的水肥一体化云灌溉系统研究[J]. 农业机械学报, 2016, 47(S1): 267-272.
JIANG X, YANG B, GAO W, et al. Cloud computing irrigation system of water and fertilizer based on dual-line decoding technology[J]. Transactions of the CSAM, 2016, 47(S1): 267-272.
[26] 骆东松, 姜浩. 农业水肥一体化智能监控系统的研究与实现[J]. 自动化技术与应用. 2020, 39(1): 164-168, 172.
LUO D, JIANG H. Research and realization of intelligent monitoring system of agricultural water and fertilizer integration [J]. Techniques of Automation and Applications, 2020, 39(1): 164-168, 172.
[27] 姜岩, 唐勇伟, 李成攻, 等. 基于专家系统的水肥一体机智能控制系统[J]. 现代农业科技, 2018(10): 191-193.
JIANG Y, TANG Y, LI C, et al. Intelligent system of water and fertilizer based on expert system[J]. Modern Agricultural Science and Technology, 2018(10): 191-193.
[28] 姜岩, 段杰, 王茂励, 等. 基于物联网技术的水肥一体化智能管理系统[J]. 现代农业科技, 2018(16): 279-281.
JIANG Y, DUAN J, WANG M, et al. Intelligent system of water and fertilizer based on internet of things technology[J]. Modern Agricultural Science and Technology, 2018(16): 279-281.
[29] PERALTAPENA, ANGELMIGUEL. Fertilizer injection with rotary vane pumps and electrical conductivity control in mixed solutions for fertirrigation[J]. Revista Ciencias Técnicas Agropecuaria, 2010, 19: ID 3.
Development and Testing of Intelligent Sensing and Precision Proportioning System of Water and Fertilizer Concentration
JIN Zhou1,4, ZHANG Junqing1,2,4, GUO Hongyan1,4, HU Yimin1,4, CHEN Xiangyu1,4*, HUANG He1,4*, WANG Hongyan3
(1.Institute of Intelligent Machines, Hefei Institute of Physical Science, Chinese Academy of Sciences, Hefei 230031, China;
2.University of Science and Technology of China, Hefei 230026, China;
3.Ningxia Agricultural IoT Engineering and Technology Research Center, Yinchuan 750000, China;
4.Intelligent Agriculture Engineering Laboratory of Anhui Province, Hefei 230031, China)
Abstract: Water and fertilizer integration technology can effectively improve nutrient utilization efficiency. However, the existing water and fertilizer machines have some shortcomings, such as huge cost, single fertilizer injection, need for cleaning water and so on, which hinder the development of water and fertilizer integration technology. Aiming at the problems of precise and low-cost compounding of compound fertilizer at the local farm, the water and fertilizer integrated intelligent irrigation and fertilization system were taken as the research object. In this research, new concept of an intelligent sensing system was proposed, and accurate proportioning system of water and fertilizer concentration was constructed and implemented. Firstly, a fast on-line method of intelligent sensing model of water and fertilizer was established based on a series of concentration gradient compound fertilizer solutions. The conductivity values of these formulated solutions were tested by contactless conductivity detection electrodes. Subsequently, the data analysis algorithms were discussed and compared to fit regression model. Based on the intelligent sensing model of water and fertilizer , the framework structure of in-situ intelligent sensing and accurate proportioning system of water and fertilizer concentration was designed, and the working principle of the system was also explained. The system proposed includs a first-level water and fertilizer concentration intelligent perception model building subsystem and a second-level water and fertilizer accurate proportioning subsystem. The first-level subsystem was designed as a portable device, which mainly included a precise pump for quantitative dosing, a large-range online conductivity sensor, a plastic bucket and supporting control and model building software. The second-level subsystem was designed as a dynamic and precise fertilizer distribution device. The effectiveness of the system was verified by three types of water intelligent fertilizer application so as to guide the in-situ water and fertilizer concentration ratio. The testing results showed that the second-order polynomial fitting curve under regularization conditions was the best model to express the relationship between the conductivity and the concentration of water and fertilizer, and the correlation coefficients
R2 was higher than 0.999. Combined with the proportion of each index of compound fertilizer, the concentration of each index of compound fertilizer that the user cares about can be obtained according to this model. The results of three types of water intelligent fertilizer application showed that the conductivity of natural water had an effect on the water and fertilizer system, and the relative deviation was more than 0.1. The online water and fertilizer perception and ratio system proposed in this research realized the elimination of the interference of the local water conductivity on the accuracy of the ratio of water and fertilizer, and the accurate calculation of compound fertilizer was achieved through model calculation. This system has a simple structure and accurate ratio, low cost, and can be easily combined with the existing water and fertilizer integrated machine or artificial fertilizer system. The system could be widely used in facility agriculture, orchard cultivation and field cash crop cultivation, et al.
Key words: water and fertilizer integration; conductivity; intelligent sensing; precision proportioning; system modeling; polynomial curve fitting

收稿日期:2020-03-31 修订日期:2020-05-20
基金项目:宁夏智慧农业产业技术协同创新中心建设任务(2017DC53);宁夏智慧农业关键技术研究与集成示范项目(2017BY067);安徽省自然科学基金青年项目(1908085QE202);合肥研究院院长基金青年“火花”项目(YZJJ2019QN14)
作者简介:金 洲(1985-),男,博士,助理研究员,研究方向为农业信息化与数据挖掘。E-mail:jinzhou@iim.ac.cn。
* 通讯作者:1.陈翔宇(1988-),男,博士,助理研究员,研究方向为农业传感器。电话:0551-65591131。E-mail:cxy0910@iim.ac.cn;2.黄 河(1980-),男,博士,副研究员,研究方向为大数据与智慧农业。电话:0551-65591131。E-mail:hhuang@iim.ac.cn。
doi: 10.12133/j.smartag.2020.2.2.202003-SA012

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号